Penggunaan PWM sebagai teknik switching
Pulse Width Modulation (PWM) adalah teknik yang umum digunakan untuk umumnya mengontrol daya DC ke perangkat listrik, dibuat praktis oleh sakelar daya elektronik modern. Namun ia juga menemukan tempatnya di helikopter AC. Nilai rata-rata arus yang disuplai ke beban dikontrol oleh posisi sakelar dan durasi kondisinya. Jika periode Nyala sakelar lebih lama dibandingkan dengan periode mati, beban menerima daya yang relatif lebih tinggi. Jadi frekuensi switching PWM harus lebih cepat.
Biasanya peralihan harus dilakukan beberapa kali dalam satu menit dalam kompor listrik, 120 Hz dalam peredup lampu, dari beberapa kilohertz (kHz) hingga puluhan kHz untuk penggerak motor. Frekuensi switching untuk penguat audio dan catu daya komputer adalah sekitar sepuluh hingga ratusan kHz. Rasio waktu ON dengan periode waktu pulsa dikenal sebagai duty cycle. Jika siklus kerja rendah, itu berarti daya rendah.
Kehilangan daya pada perangkat switching sangat rendah, karena jumlah arus yang mengalir hampir dapat diabaikan dalam keadaan perangkat mati dan jumlah penurunan tegangan yang dapat diabaikan dalam keadaan MATI. Kontrol digital juga menggunakan teknik PWM. WPM juga telah digunakan dalam sistem komunikasi tertentu dimana duty cycle-nya telah digunakan untuk menyampaikan informasi melalui saluran komunikasi.

PWM dapat digunakan untuk mengatur jumlah total daya yang dikirim ke beban tanpa kerugian yang biasanya terjadi ketika transfer daya dibatasi oleh alat resistif. Kekurangannya adalah pulsasi yang ditentukan oleh siklus kerja, frekuensi switching, dan sifat beban. Dengan frekuensi switching yang cukup tinggi dan, bila perlu, menggunakan filter elektronik pasif tambahan, rangkaian pulsa dapat diperhalus dan bentuk gelombang analog rata-rata dipulihkan. Sistem kontrol PWM frekuensi tinggi dapat dengan mudah diimplementasikan menggunakan sakelar semikonduktor.
Seperti yang telah disebutkan di atas, hampir tidak ada daya yang dihamburkan oleh sakelar dalam keadaan hidup atau mati. Namun, selama transisi antara keadaan hidup dan mati baik tegangan dan arus tidak nol dan dengan demikian daya yang cukup besar dihamburkan di sakelar. Untungnya, perubahan keadaan antara hidup dan mati sepenuhnya cukup cepat (biasanya kurang dari 100 nanodetik) relatif terhadap waktu hidup atau mati yang khas, sehingga disipasi daya rata-rata cukup rendah dibandingkan dengan daya yang dikirim bahkan ketika frekuensi switching tinggi. digunakan.
Penggunaan PWM untuk mengalirkan daya DC ke beban
Sebagian besar proses industri harus dijalankan pada parameter tertentu yang menyangkut kecepatan penggerak. Sistem penggerak elektrik yang digunakan dalam banyak aplikasi industri memerlukan kinerja, keandalan, kecepatan variabel yang lebih tinggi karena kemudahan pengendaliannya. Itu kontrol kecepatan motor DC penting dalam aplikasi yang mengutamakan presisi dan perlindungan. Tujuan pengontrol kecepatan motor adalah untuk mengambil sinyal yang mewakili kecepatan yang diperlukan dan untuk menggerakkan motor pada kecepatan tersebut.
Modulasi lebar-pulsa (PWM), seperti yang diterapkan pada kontrol motor, adalah cara menghantarkan energi melalui rangkaian pulsa daripada sinyal (analog) yang terus berubah. Dengan menambah atau mengurangi lebar pulsa, pengontrol mengatur aliran energi ke poros motor. Induktansi motor sendiri bertindak seperti filter, menyimpan energi selama siklus 'ON' sambil melepaskannya pada kecepatan yang sesuai dengan sinyal input atau referensi. Dengan kata lain, energi yang mengalir ke beban tidak begitu banyak pada frekuensi switching, tetapi pada frekuensi referensi.
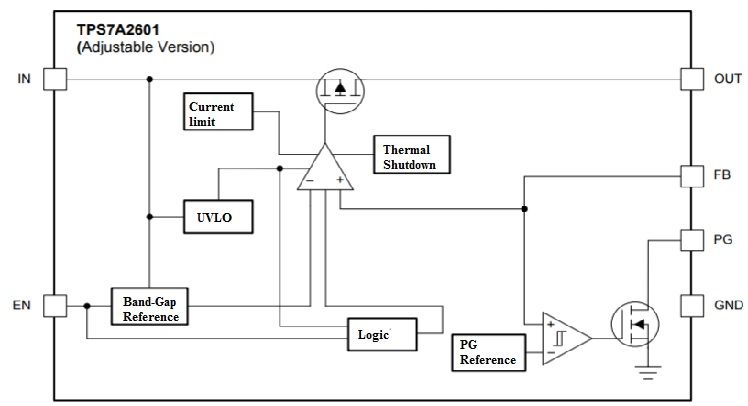
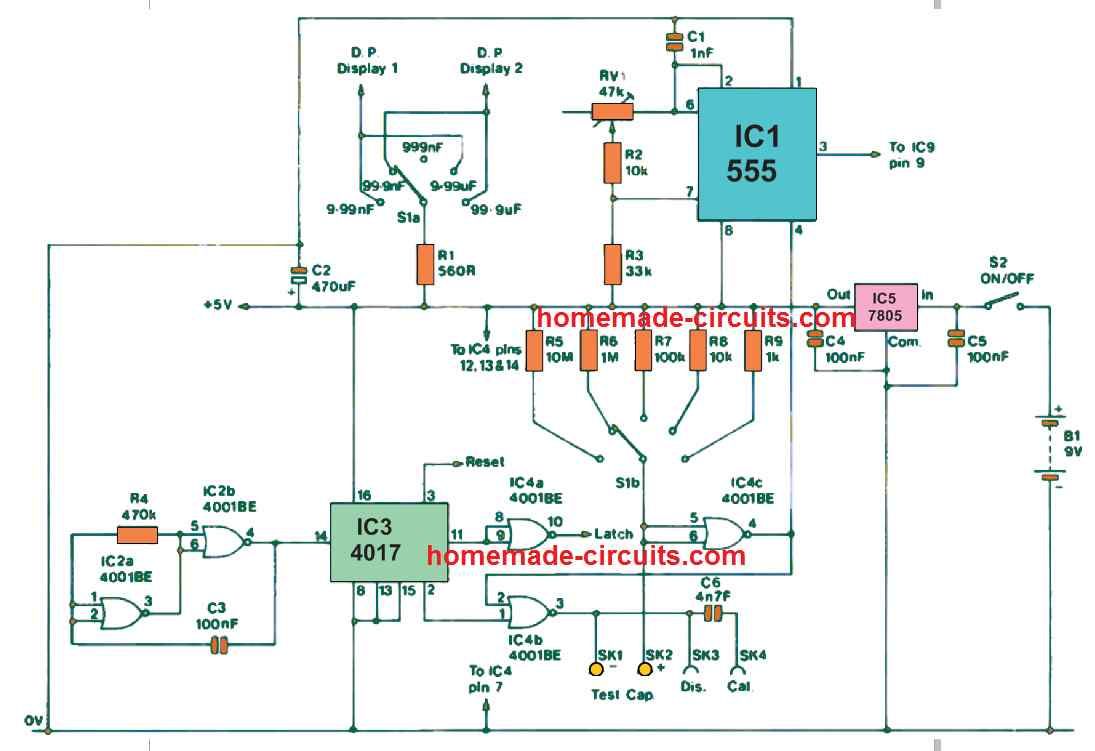
Sirkuit digunakan untuk mengontrol kecepatan Motor DC dengan menggunakan teknik PWM. Seri Variable Speed DC Motor Controller 12V menggunakan IC timer 555 sebagai pembangkit pulsa PWM untuk mengatur kecepatan motor DC12 Volt. IC 555 adalah Chip Timer populer yang digunakan untuk membuat rangkaian timer. Itu diperkenalkan pada tahun 1972 oleh Signetics. Disebut 555 karena ada tiga resistor 5 K di dalamnya. IC terdiri dari dua komparator, rantai resistor, Flip Flop dan tingkat keluaran. Ini bekerja dalam 3 mode dasar- Astable, Monostable (di mana ia bertindak sebagai generator pulsa satu tembakan dan mode Bistable. Artinya, ketika dipicu, output menjadi tinggi untuk suatu periode berdasarkan nilai resistor waktu dan kapasitor. Modus Astable (AMV), IC bekerja sebagai multivibrator yang berjalan bebas. Output berubah tinggi dan rendah terus menerus untuk memberikan output berdenyut sebagai osilator. Dalam mode Bistable juga dikenal sebagai pemicu Schmitt, IC beroperasi sebagai Flip-Flop dengan tinggi atau output rendah pada setiap pemicu dan reset.

Di sirkuit ini, MOSFET IRF540 digunakan. Ini adalah MOSFET peningkatan N-Channel. Ini adalah MOSFET daya canggih yang dirancang, diuji, dan dijamin untuk menahan tingkat energi tertentu dalam mode operasi longsoran kerusakan. MOSFET daya ini dirancang untuk aplikasi seperti regulator switching, konverter switching, driver motor, driver relai, dan driver untuk transistor switching bipolar daya tinggi yang membutuhkan kecepatan tinggi dan daya drive gerbang rendah. Jenis ini dapat dioperasikan langsung dari sirkuit terintegrasi. Tegangan kerja rangkaian ini dapat diatur sesuai kebutuhan motor DC yang digerakkan. Sirkuit ini dapat bekerja dari 5-18VDC.
Di atas sirkuit yaitu Kontrol kecepatan motor DC dengan PWM teknik memvariasikan siklus kerja yang pada gilirannya mengontrol kecepatan motor. IC 555 terhubung dalam mode astable multi vibrator yang berjalan bebas. Rangkaian terdiri dari susunan potensiometer dan dua dioda, yang digunakan untuk mengubah duty cycle dan menjaga frekuensi agar tetap konstan. Karena resistansi resistor variabel atau potensiometer bervariasi, siklus kerja pulsa yang diterapkan ke MOSFET bervariasi dan karenanya daya DC ke motor bervariasi dan dengan demikian kecepatannya meningkat seiring dengan peningkatan siklus kerja.
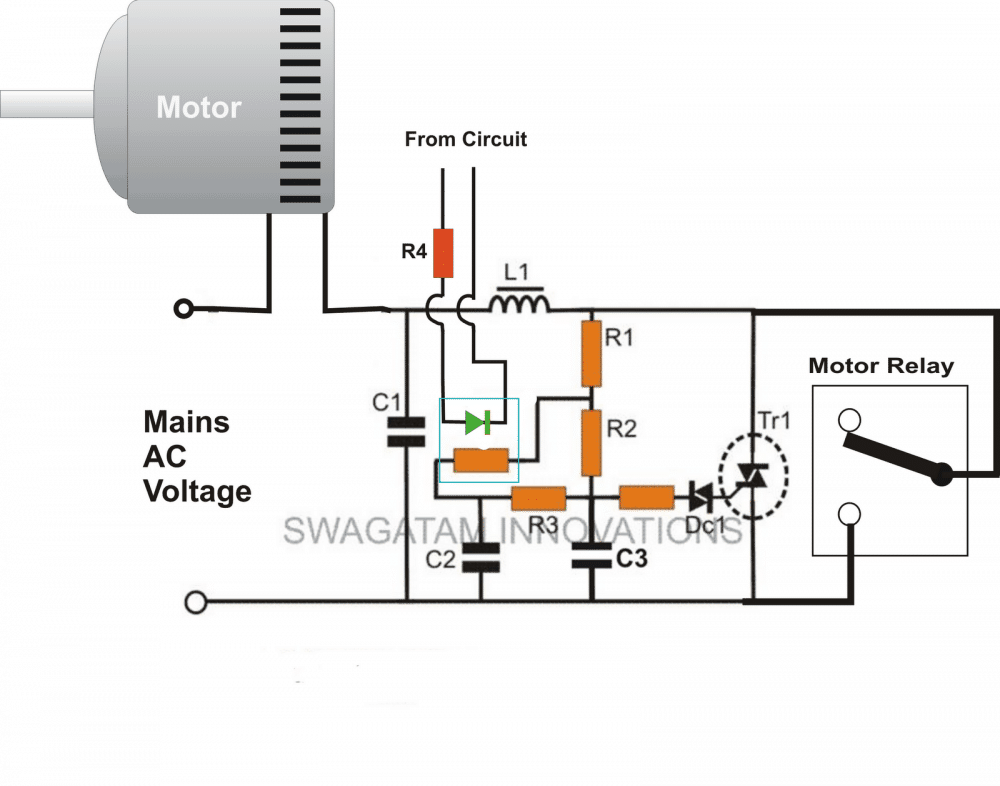
Penggunaan PWM untuk mengalirkan daya AC ke beban
Sakelar semikonduktor modern seperti MOSFET atau transistor bipolar gerbang-terisolasi (IGBT) adalah komponen yang cukup ideal. Dengan demikian pengontrol efisiensi tinggi dapat dibangun. Biasanya konverter frekuensi yang digunakan untuk mengontrol motor AC memiliki efisiensi yang lebih baik dari 98%. Pengalihan catu daya memiliki efisiensi yang lebih rendah karena tingkat tegangan keluaran yang rendah (bahkan seringkali kurang dari 2 V untuk mikroprosesor diperlukan) tetapi masih lebih dari 70-80% efisiensi dapat dicapai.

Jenis kontrol untuk AC ini dikenal dengan metode sudut tembak tertunda. Ini lebih murah dan menghasilkan banyak gangguan listrik dan harmonisa dibandingkan dengan kontrol PWM nyata yang menghasilkan kebisingan yang dapat diabaikan.
Dalam banyak aplikasi, seperti pemanasan industri, kontrol pencahayaan, motor induksi mulai lunak, dan pengontrol kecepatan untuk kipas dan pompa memerlukan tegangan AC variabel dari sumber AC tetap. Kontrol sudut fasa regulator telah banyak digunakan untuk persyaratan ini. Ini menawarkan beberapa keuntungan seperti kesederhanaan dan kemampuan mengendalikan sejumlah besar daya secara ekonomis. Namun, sudut tembak yang tertunda menyebabkan diskontinuitas dan banyak harmonisa dalam arus beban dan faktor daya yang tertinggal terjadi di sisi AC ketika sudut tembak meningkat.
Masalah ini dapat diperbaiki dengan menggunakan pencacah PWM AC. Chopper PWM AC ini menawarkan beberapa keuntungan seperti arus masukan sinusoidal dengan faktor daya hampir satu. Namun, untuk mengurangi ukuran filter dan meningkatkan kualitas pengatur keluaran, frekuensi switching harus ditingkatkan. Hal ini menyebabkan kerugian switching yang tinggi. Masalah lainnya adalah pergantian antara saklar pemindah S1 dengan saklar freewheeling S2. Ini menyebabkan lonjakan arus jika kedua sakelar dihidupkan pada saat yang sama (korsleting), dan lonjakan tegangan jika kedua sakelar dimatikan (tidak ada jalur freewheeling). Untuk menghindari masalah ini, snubber RC digunakan. Namun, ini meningkatkan kehilangan daya di sirkuit dan sulit, mahal, besar, dan tidak efisien untuk aplikasi berdaya tinggi. Chopper AC dengan sakelar tegangan arus nol (ZCS-ZVS) diusulkan. Pengatur tegangan outputnya perlu memvariasikan waktu mematikan yang dikendalikan oleh sinyal PWM. Dengan demikian, diperlukan penggunaan kendali frekuensi untuk mencapai peralihan lunak dan sistem kendali umum menggunakan teknik PWM yang menghasilkan waktu penyalaan. Teknik ini memiliki kelebihan seperti kontrol sederhana dengan modulasi sigma-delta dan arus masukan kontinu. Fitur konfigurasi rangkaian yang diusulkan dan pola cincang PWM disajikan di bawah ini.