Dalam periode ke-18thabad itu sendiri, ada evolusi motor DC. Perkembangan motor DC telah meningkat pesat dan diterapkan secara signifikan di berbagai industri. Pada periode awal 1800-an dan dengan peningkatan yang dibuat pada tahun 1832, motor DC pada awalnya dikembangkan oleh peneliti Inggris Sturgeon. Dia menemukan jenis motor DC komutator awal yang memiliki kemampuan untuk mensimulasikan mesin juga. Tetapi orang mungkin bertanya-tanya apa fungsi dari motor DC dan mengapa penting untuk mengetahui tentang kontrol kecepatan motor DC. Jadi, artikel ini dengan jelas menjelaskan pengoperasiannya dan berbagai teknik pengendalian kecepatan.
Apa itu Motor DC?
Motor Dc dioperasikan dengan menggunakan arus searah dimana ia mengubah energi listrik yang diterima menjadi energi mekanik. Ini memicu perubahan rotasi di perangkat itu sendiri sehingga memberikan daya untuk mengoperasikan berbagai aplikasi di beberapa domain.
Kontrol kecepatan motor DC adalah salah satu fitur motor yang paling berguna. Dengan mengontrol kecepatan motor, Anda dapat memvariasikan kecepatan motor sesuai dengan kebutuhan dan dapat memperoleh pengoperasian yang diperlukan.
Mekanisme kontrol kecepatan dapat diterapkan dalam banyak kasus seperti mengontrol pergerakan kendaraan robotik, pergerakan motor di pabrik kertas, dan pergerakan motor di elevator dimana berbagai jenis motor DC digunakan.
Prinsip Kerja Motor DC
Motor DC sederhana bekerja dengan prinsip bahwa ketika konduktor pembawa arus ditempatkan di a setia magnetis d, mengalami gaya mekanis. Dalam motor DC praktis, angker adalah konduktor pembawa arus dan medan magnet menghasilkan medan magnet.
Ketika konduktor (angker) disuplai dengan arus, ia menghasilkan fluks magnetnya sendiri. Fluks magnet menambah fluks magnet karena belitan medan dalam satu arah atau membatalkan fluks magnet karena belitan medan. Akumulasi fluks magnet dalam satu arah dibandingkan dengan yang lain memberikan gaya pada konduktor, dan oleh karena itu, konduktor mulai berputar.
Menurut hukum induksi elektromagnetik Faraday, aksi memutar konduktor menghasilkan EMF . EMF ini, menurut hukum Lenz, cenderung menentang penyebabnya, yaitu tegangan yang disuplai. Dengan demikian, motor DC memiliki karakteristik yang sangat khusus untuk mengatur torsi jika terjadi beban yang bervariasi karena EMF belakang.
Mengapa Kontrol Kecepatan Motor DC Penting?
Kontrol kecepatan pada mesin menunjukkan pengaruh terhadap kecepatan putaran motor dimana hal ini berpengaruh langsung pada fungsionalitas mesin dan sangat penting untuk kinerja dan hasil kinerja. Pada saat pemboran, setiap jenis material memiliki kecepatan rotasinya masing-masing dan dapat berubah berdasarkan ukuran bor juga.
Dalam skenario pemasangan pompa, akan ada perubahan laju keluaran sehingga sabuk konveyor harus sinkron dengan kecepatan fungsional perangkat. Faktor-faktor ini datang secara langsung atau tidak langsung tergantung pada kecepatan motor. Karena itu, seseorang harus mempertimbangkan kecepatan motor DC dan mengamati berbagai jenis metode kontrol kecepatan.
Pengatur kecepatan motor DC dilakukan secara manual oleh pekerja atau dengan menggunakan alat pengontrol otomatis. Hal ini terlihat berbeda dengan batasan kecepatan dimana harus ada pengaturan kecepatan yang berlawanan dengan variasi kecepatan yang alami karena variasi beban poros.
Prinsip Kontrol Kecepatan
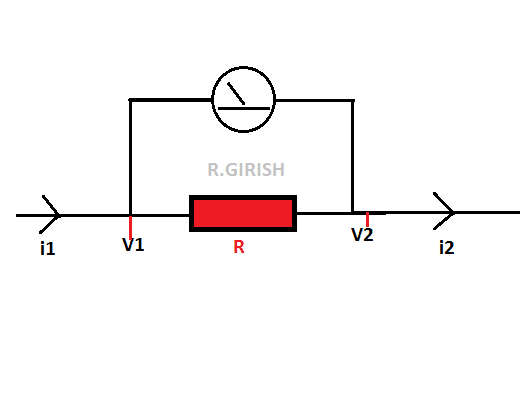
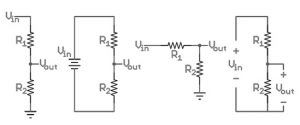
Dari gambar di atas, persamaan tegangan menjadi sederhana Motor DC aku s
V = Eb + IaRa
V adalah tegangan yang disuplai, Eb adalah EMF belakang, Ia adalah arus jangkar, dan Ra adalah tahanan jangkar.
Kami sudah tahu itu
Eb = (PøNZ) / 60A.
P - jumlah kutub,
A - konstan
Z - jumlah konduktor
N- kecepatan motor
Mengganti nilai Eb dalam persamaan tegangan, kita dapatkan
V = (PøNZ) / 60A) + IaRa
Atau, V - IaRa = (PøNZ) / 60A
yaitu, N = (PZ / 60A) (V - IaRa) / ø
Persamaan di atas juga bisa ditulis sebagai:
N = K (V - IaRa) / ø, K adalah konstanta
Ini menyiratkan tiga hal:
- Kecepatan motor berbanding lurus dengan tegangan suplai.
- Kecepatan motor berbanding terbalik dengan penurunan tegangan jangkar.
- Kecepatan motor berbanding terbalik dengan fluks karena temuan lapangan
Dengan demikian, kecepatan motor DC dapat dikontrol dengan tiga cara:
- Dengan memvariasikan tegangan suplai
- Dengan memvariasikan fluks, dan dengan memvariasikan arus yang melalui lilitan medan
- Dengan memvariasikan tegangan jangkar, dan dengan memvariasikan tahanan jangkar
Berbagai Teknik Kontrol Kecepatan Motor DC
Karena ada dua jenis motor DC, di sini kita akan dengan jelas membahas metode pengontrol kecepatan dari seri DC dan motor shunt.
Kontrol Kecepatan Motor DC dalam Jenis Seri
Ini dapat dikategorikan menjadi dua jenis dan itu adalah:
- Teknik terkontrol angker
- Teknik pengontrolan lapangan
Teknik kendali angker selanjutnya diklasifikasikan menjadi tiga jenis
- Resistensi terkontrol angker
- Kontrol armature shunt
- Tegangan terminal angker
Resistensi Terkendali Angker
Teknik ini paling banyak digunakan di mana resistansi pengatur memiliki koneksi seri dengan suplai motor. Gambar di bawah menjelaskan hal ini.

Kontrol Resistensi Angker
Kehilangan daya yang terjadi pada tahanan pengendali motor seri DC dapat diabaikan karena teknik pengaturan ini banyak digunakan dalam jangka waktu lama untuk menurunkan kecepatan pada saat skenario pembebanan ringan. Ini adalah teknik hemat biaya untuk torsi persisten dan terutama diterapkan dalam menggerakkan derek, kereta api, dan kendaraan lain.
Kontrol Armature Shunted
Di sini, rheostat akan berada di seri dan koneksi shunting dengan angker. Akan ada perubahan level tegangan yang diterapkan pada dinamo dan ini bervariasi dengan mengubah seri rheostat . Sedangkan perubahan arus eksitasi terjadi dengan mengubah shunt rheostat. Teknik pengendalian kecepatan pada motor DC ini tidak terlalu mahal karena kehilangan daya yang signifikan dalam hambatan pengaturan kecepatan. Kecepatan dapat diatur sampai batas tertentu tetapi tidak di atas tingkat kecepatan normal.

Metode Kontrol Kecepatan Motor DC Shunted Armature
Tegangan Terminal Angker
Kecepatan motor seri DC juga dapat dilakukan melalui catu daya ke motor menggunakan tegangan suplai yang bervariasi, tetapi pendekatan ini mahal dan tidak diterapkan secara ekstensif.
Teknik pengendalian lapangan selanjutnya diklasifikasikan menjadi dua jenis:
- Pengalih Bidang
- Mengontrol bidang yang disadap (Kontrol bidang yang disadap)
Teknik Field Diverter
Teknik ini menggunakan pengalir. Laju fluks yang melintasi medan dapat dikurangi dengan melakukan shunting beberapa bagian dari arus motor yang melintasi bidang seri. Semakin kecil resistansi pengalir, arus medan semakin kecil. Teknik ini digunakan untuk lebih dari kisaran kecepatan normal dan diterapkan di seluruh penggerak listrik di mana kecepatan meningkat bila ada penurunan beban.

Kontrol Kecepatan Motor DC Pengalih Bidang
Mengontrol Bidang yang Disadap
Di sini juga, dengan pengurangan fluks, kecepatan akan meningkat dan itu dilakukan dengan mengurangi belitan medan dari tempat aliran arus terjadi. Di sini, jumlah sadapan dalam belitan medan diambil dan teknik ini digunakan dalam traksi listrik.
Kontrol Kecepatan Motor DC Shunt
Ini dapat dikategorikan menjadi dua jenis dan itu adalah:
- Teknik pengontrolan lapangan
- Teknik terkontrol angker
Metode Kontrol Lapangan untuk Motor Shunt DC
Dalam metode ini, fluks magnet akibat belitan medan divariasikan untuk memvariasikan kecepatan motor.
Karena fluks magnet bergantung pada arus yang mengalir melalui belitan medan, fluks magnet dapat divariasikan dengan memvariasikan arus yang melalui belitan medan. Ini dapat dicapai dengan menggunakan resistor variabel secara seri dengan resistor gulungan medan.
Awalnya, ketika resistor variabel dijaga pada posisi minimumnya, arus pengenal mengalir melalui gulungan medan karena tegangan suplai pengenal, dan sebagai hasilnya, kecepatan dijaga agar tetap normal. Ketika resistansi dinaikkan secara bertahap, arus yang melalui medan berliku berkurang. Ini pada gilirannya menurunkan fluks yang dihasilkan. Dengan demikian, kecepatan motor meningkat melebihi nilai normalnya.
Metode Kontrol Resistensi Angker untuk Motor DC Shunt
Dengan metode ini, kecepatan motor DC dapat dikontrol dengan mengontrol resistansi jangkar untuk mengontrol penurunan tegangan pada jangkar. Cara ini juga menggunakan resistor variabel yang di seri dengan angker.
Ketika resistor variabel mencapai nilai minimumnya, resistansi jangkar berada pada nilai normal, dan oleh karena itu, tegangan jangkar turun. Ketika nilai resistansi dinaikkan secara bertahap, tegangan di seluruh dinamo berkurang. Hal ini pada gilirannya menyebabkan penurunan kecepatan motor.
Metode ini mencapai kecepatan motor di bawah kisaran normalnya.
Metode Kontrol Tegangan Angker untuk Motor DC Shunt (Metode Ward Leonard)
Teknik Ward Leonard Sirkuit kendali kecepatan motor DC ditampilkan sebagai berikut:
Pada gambar di atas, M adalah motor utama di mana kecepatannya akan diatur dan G sesuai dengan generator DC yang digerakkan secara individual di mana ini digerakkan dengan menggunakan motor tiga fase dan dapat berupa motor sinkron atau motor induksi. Pola kombinasi generator DC dan motor penggerak AC ini disebut sebagai set M-G.
Tegangan generator divariasikan dengan mengubah arus medan generator. Tingkat tegangan ini ketika diberikan ke bagian dinamo motor DC dan kemudian M bervariasi. Untuk menjaga fluks medan motor konstan, arus medan motor harus dijaga agar konstan. Jika kecepatan motor diatur, maka arus dinamo untuk motor harus sama dengan arus pengenal.
Arus medan yang dikirim akan berbeda sehingga level jangkar tegangan bervariasi dari '0' ke level pengenal. Karena pengaturan kecepatan sesuai dengan arus pengenal dan dengan fluks medan persisten dari motor dan fluks medan sampai kecepatan pengenal tercapai. Dan karena tenaga adalah hasil perkalian dari kecepatan dan torsi dan memiliki proporsi yang langsung dengan kecepatan. Dengan ini, ketika ada peningkatan daya, kecepatannya meningkat.
Kedua metode yang disebutkan di atas tidak dapat memberikan kontrol kecepatan dalam kisaran yang diinginkan. Selain itu, metode kontrol fluks dapat memengaruhi pergantian, sedangkan metode kontrol jangkar melibatkan kehilangan daya yang sangat besar karena penggunaan resistor secara seri dengan angker. Oleh karena itu, metode yang berbeda sering diinginkan - metode yang mengontrol tegangan suplai untuk mengontrol kecepatan motor.
Akibatnya, dengan teknik Ward Leonard, penggerak daya yang dapat disesuaikan dan nilai torsi yang konstan diperoleh dari tingkat kecepatan minimal hingga tingkat kecepatan dasar. Teknik pengaturan fluks medan terutama digunakan ketika tingkat kecepatan lebih dari kecepatan dasar.
Di sini, dalam fungsinya, arus jangkar dijaga pada level konstan pada nilai yang ditentukan dan nilai tegangan generator dipertahankan pada konstan. Dalam metode seperti itu, belitan medan menerima tegangan tetap, dan dinamo mendapat tegangan variabel.
Salah satu teknik metode kontrol tegangan melibatkan penggunaan mekanisme switchgear untuk memberikan tegangan variabel ke angker, dan yang lainnya menggunakan Generator yang digerakkan motor AC untuk memberikan tegangan variabel ke angker (the Sistem Ward-Leonard ).
Itu keuntungan & kerugian dari bangsal Leonard metho d adalah:
Manfaat penggunaan teknik Ward Leonard untuk kontrol kecepatan motor DC adalah sebagai berikut:
- Di kedua arah, seseorang dapat mengontrol kecepatan perangkat dengan mulus untuk jarak yang lebih jauh
- Teknik ini memiliki kemampuan pengereman intrinsik
- Volt-ampere reaktif trailing diimbangi melalui penggerak dan motor sinkron yang sangat bersemangat bertindak sebagai penggerak sehingga akan ada kenaikan dalam faktor daya
- Ketika ada beban yang berkedip, motor penggerak adalah motor induksi memiliki flywheel yang digunakan untuk mengurangi beban flashing ke tingkat minimal
Kerugian dari teknik Ward Leonard adalah:
- Karena teknik ini memiliki satu set motor dan generator, biayanya lebih mahal
- Perangkat ini rumit untuk dirancang dan memiliki kelas berat juga
- Perlu lebih banyak ruang untuk instalasi
- Membutuhkan perawatan rutin dan pondasi tidak hemat biaya
- Akan ada kerugian yang sangat besar sehingga efisiensi sistem berkurang
- Lebih banyak noise yang dihasilkan
Dan penerapan metode Ward Leonard adalah pengendalian kecepatan yang mulus di motor DC. Beberapa contohnya adalah kerekan tambang, pabrik kertas, lift, rolling mills, dan crane.
Terlepas dari kedua teknik tersebut, teknik yang paling banyak digunakan adalah kontrol kecepatan motor dc menggunakan PWM untuk mencapai kontrol kecepatan motor DC. PWM melibatkan penerapan pulsa lebar yang bervariasi ke driver motor untuk mengontrol tegangan yang diterapkan ke motor. Metode ini terbukti sangat efisien karena kehilangan daya dijaga seminimal mungkin, dan tidak melibatkan penggunaan peralatan yang rumit.

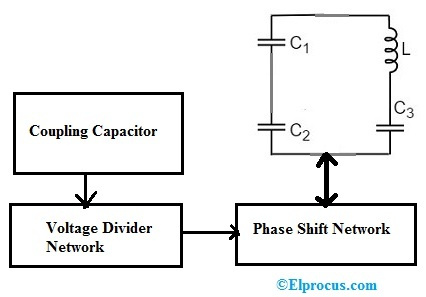
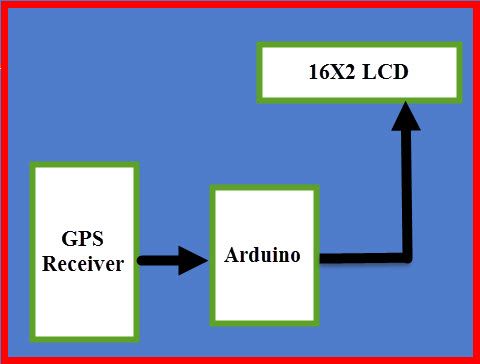
Metode Kontrol Tegangan
Diagram blok di atas mewakili yang sederhana pengontrol kecepatan motor listrik . Seperti yang digambarkan dalam diagram blok di atas, mikrokontroler digunakan untuk memberi makan sinyal PWM ke driver motor. Driver motor adalah IC L293D yang terdiri dari rangkaian H-bridge untuk menggerakkan motor.
PWM dicapai dengan memvariasikan pulsa yang diterapkan ke pin pengaktifan IC driver motor untuk mengontrol tegangan yang diberikan motor. Variasi pulsa dilakukan oleh mikrokontroler, dengan sinyal input dari tombol tekan. Di sini, tersedia dua tombol, masing-masing untuk menurunkan dan meningkatkan siklus kerja pulsa.
Nah, artikel ini telah memberikan penjelasan rinci tentang berbagai teknik pengendalian kecepatan motor DC dan cara pengendalian kecepatan yang paling penting untuk diperhatikan. Selanjutnya dianjurkan untuk mengetahui tentang pengontrol kecepatan motor 12v dc .