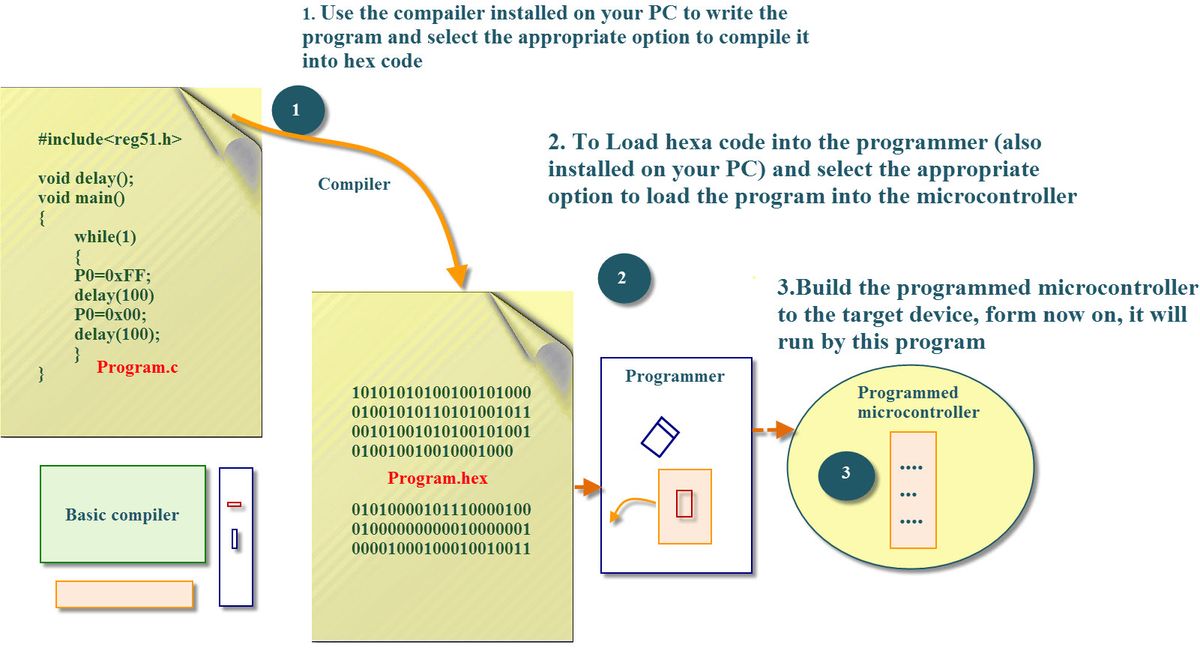
Di dunia modern, robot akan memainkan peran penting . Tujuan utama robot adalah untuk menurunkan tenaga kerja. Robot digunakan dalam elektronik dalam banyak aplikasi. Pada artikel kali ini kita telah membahas tentang cara membuat robot dengan modul Arduino & mikrokontroler 8051. Untuk membangun robot dengan Arduino kami menjelaskan tentang robot arduino dengan penghindaran rintangan. Komponen yang dibutuhkan antara lain Body Robot, Motor DC, Sensor Ultrasonic, Modul Arduino, IC Driver Motor dan Modul Arduino
Bagaimana Cara Membuat Robot?
Itu komponen yang dibutuhkan untuk membangun robot termasuk yang berikut ini
Tubuh Robot
Badan robot dasar robot penghindaran rintangan ditunjukkan pada gambar berikut. Badan robot adalah badan plastik dan berisi roda di kedua sisinya. Di depan badan robot diatur sensor ultrasonik. Dengan menggunakan sensor ultrasonik hambatan dapat dideteksi. Saat robot bergerak, jika ada halangan yang terdeteksi oleh sensor ultrasonik maka robot akan bergerak ke samping dan akan terus bergerak.

Tubuh Robot
Motor DC
Itu Motor DC adalah motor listrik dan beroperasi dengan listrik arus searah. Pengoperasian motor listrik apa pun didasarkan pada elektromagnetisme. Medan magnet yang dihasilkan oleh penghantar arus jika ditempatkan pada medan magnet luar akan mengalami gaya yang sebanding dengan arus pada penghantar. Secara umum, kita mengetahui bahwa magnet berlawanan dengan tarikan polaritas dari utara ke selatan dan jika polaritasnya sama seperti utara ke utara & selatan ke selatan maka magnet akan menolak.

Motor DC
Konfigurasi internal motor DC dirancang untuk melampirkan interaksi magnetik antara konduktor pembawa arus dan medan magnet eksternal untuk menghasilkan gerakan. Dalam hal ini kami menggunakan dua motor DC, masing-masing motor berisi 6v dan total dua motor DC berisi 12v. Kedua motor DC tersebut ditempatkan pada badan robot yang dapat kita amati pada gambar berikut. Badan robot digerakkan dengan bantuan motor DC

Tubuh Robot dengan Motor DC
Modul Arduino
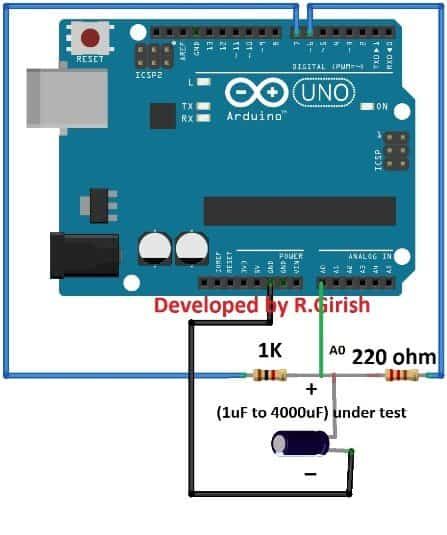
Gambar berikut menunjukkan gambar modul arduino. Itu modul Arduino memainkan peran penting dalam perancangan robot penghindaran rintangan menggunakan kit arduino. Pin penerima arduino dihubungkan ke pin kedua sensor ultrasonik dan pin ke-1, ke-2, & ke-3 modul arduino dihubungkan ke driver motor DC. Komponen umum kapasitor dan dioda juga terhubung ke modul arduino dengan bantuan catu daya baterai.

Modul Arduino
IC Pengemudi Motor
Untuk menjalankan motor DC IC driver motor bekas. Pin 3,6 & 11,14 dari driver motor dihubungkan ke motor DC. Pin input 1 dan 2 dihubungkan ke modul arduino dan pin pengaktifan dihubungkan ke pin pemancar arduino. Pin 4, 5, 12, 13 dari driver motor terhubung ke ground.

IC Pengemudi Motor
Sensor ultrasonik
Dalam konsep ini sensor ultrasonik digunakan untuk mendeteksi rintangan di depan dan itu akan mengirim perintah ke papan arduino. Tergantung pada sinyal input, mikrokontroler mengarahkan robot untuk bergerak ke arah alternatif.

Sensor ultrasonik
Aplikasi penghindaran rintangan robot arduino
- Robot arduino dapat bergerak di permukaan apa pun
- Dapat bergerak di permukaan logam seperti badan lemari es.
Gambar di bawah ini menunjukkan robot arduino untuk menghindari rintangan

Robot Arduino untuk Menghindari Rintangan
Untuk membangun robot dengan mikrokontroler 8.051 kami menjelaskan tentang kendaraan robot pendeteksi logam. Komponen yang dibutuhkan untuk membangun robot dengan mikrokontroler 8.051 adalah
- 8051 mikrokontroler
- Motor DC
- Pengemudi motor
- Detektor logam
- Dekoder
- Pembuat enkode
- Tekan tombol
- Kristal
- Pemancar dan penerima RF
Detektor logam
Itu detektor logam adalah kumparan yang memiliki satu atau lebih kumparan logam yang digunakan untuk mendeteksi logam di tanah. Detektor logam bekerja berdasarkan prinsip induksi elektromagnetik. Detektor logam dihubungkan ke badan robot melalui PCB yang dapat kita amati pada gambar terakhir. Gambar berikut menunjukkan detektor logam umum yang digunakan dalam proyek elektronik.

Detektor logam
Tekan tombol
Tombol tekan adalah tombol yang terbuat dari logam keras seperti plastik dan logam. Umumnya push button digunakan untuk mereset program di mikrokontroler. Gambar berikut menunjukkan gambar tombol tekan.

Tekan tombol
8051 Mikrokontroler
Itu Mikrokontroler 8.051 terdiri dari 40 pin . Pin ke-4 & ke-5 dari mikrokontroler terhubung ke osilator kristal. Pin Vcc diberikan ke catu daya 5V dan pin ground dihubungkan ke ground. Pin 15, 16, 18, 19 dari mikrokontroler dihubungkan ke IC encoder HT12E. Pin mikrokontroler 2, 7, 8, 9, dihubungkan ke tombol tekan.
Gambar berikut setelah menghubungkan semua komponen seperti resistor, kapasitor, osilator kristal, mikrokontroler seri 8051, encoder dan lain-lain ada di papan sirkuit tercetak .

Koneksi PCB
Gambar di bawah ini menunjukkan robot metal detector dengan mikrokontroler seri 8051.

Robot Pendeteksi Logam dengan Mikrokontroler Seri 8051
Pada artikel ini kita telah membahas tentang Cara membuat robot dengan Arduino dan Mikrokontroler 8051 . Saya harap dengan membaca artikel ini Anda mendapatkan pengetahuan dasar untuk membuat robot. Jika Anda memiliki pertanyaan tentang artikel ini atau tentang elektronik dan proyek komunikasi , silakan berkomentar di bagian bawah. Inilah pertanyaan untuk Anda, Apa itu mikrokontroler seri 8051?
.