Sirkuit VFD 3 fase yang disajikan ( dirancang oleh saya ) dapat digunakan untuk mengontrol kecepatan motor AC tiga fase apa pun atau bahkan motor AC tanpa sikat. Ide itu diminta oleh Pak Tom
Menggunakan PKS
Rangkaian VFD 3 fase yang diusulkan dapat diterapkan secara universal untuk sebagian besar motor AC 3 fase di mana efisiensi regulasi tidak terlalu kritis.
Ini dapat digunakan secara khusus untuk mengendalikan kecepatan motor induksi sangkar tupai dengan mode loop terbuka, dan mungkin juga dalam mode loop tertutup yang akan dibahas di bagian artikel selanjutnya.
Modul Diperlukan untuk Inverter 3 Fase
Untuk merancang VFD 3 fase yang diusulkan atau rangkaian penggerak frekuensi variabel, tahapan rangkaian fundamental berikut pada dasarnya diperlukan:
- Rangkaian pengontrol tegangan PWM
- Sirkuit driver H-bridge sisi tinggi / sisi rendah 3 fase
- Sirkuit generator 3 fase
- Rangkaian konverter tegangan ke frekuensi untuk menghasilkan parameter V / Hz.
Mari pelajari detail fungsi dari tahapan di atas dengan bantuan penjelasan berikut:
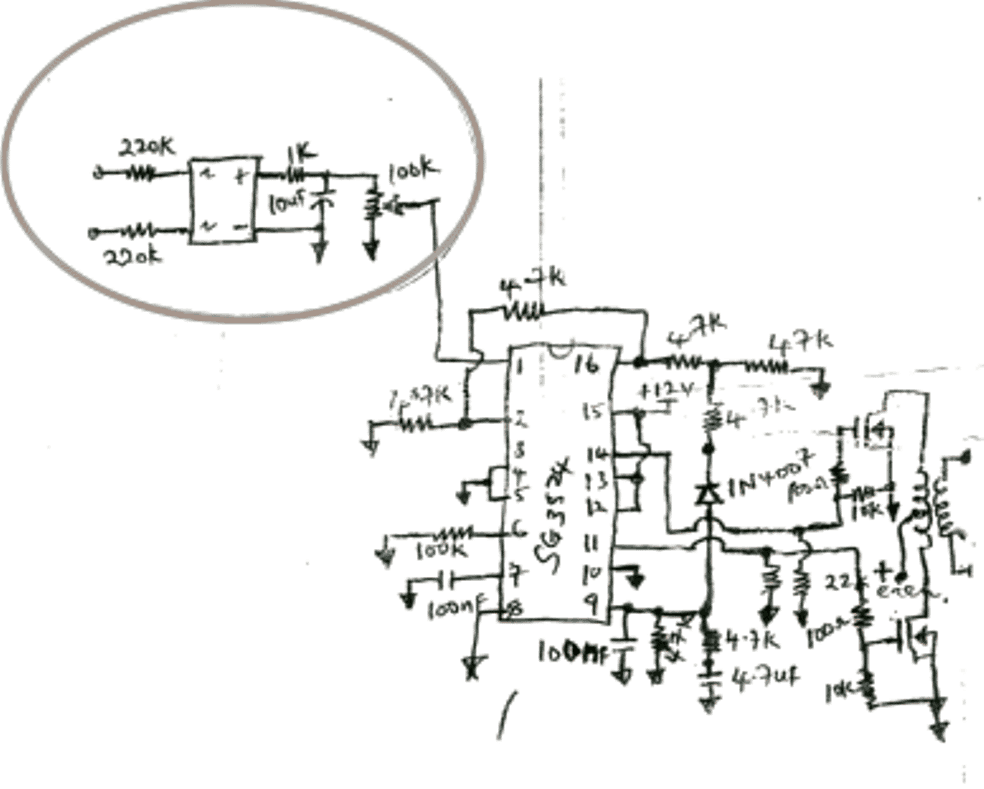
Rangkaian pengontrol tegangan PWM sederhana dapat disaksikan dalam diagram di bawah ini:

Pengontrol PWM
Saya telah memasukkan dan menjelaskan fungsi tahap generator PWM di atas yang pada dasarnya dirancang untuk menghasilkan keluaran PWM yang bervariasi di pin3 dari IC2 sebagai respons terhadap potensi yang diterapkan pada pin5 dari IC yang sama.
Preset 1K yang ditunjukkan dalam diagram adalah kenop kontrol RMS, yang dapat diatur secara tepat untuk memperoleh jumlah tegangan keluaran yang diinginkan dalam bentuk PWM pada pin3 dari IC2 untuk diproses lebih lanjut. Ini diatur untuk menghasilkan output yang sesuai yang mungkin setara dengan sumber listrik 220V atau 120V AC RMS.
Sirkuit Pengemudi H-Bridge
Diagram selanjutnya di bawah ini menunjukkan rangkaian driver H-bridge 3 phase chip tunggal dengan menggunakan IC IRS2330.
Desainnya terlihat sederhana karena sebagian besar kerumitan ditangani oleh chip yang terintegrasi dengan sirkuit canggih.
Sinyal 3 fase yang dihitung dengan baik diterapkan di seluruh input HIN1 / 2/3 dan LIN1 / 2/3 dari IC melalui tahap generator sinyal 3 fase.
Keluaran dari IC IRS2330 dapat dilihat terintegrasi dengan 6 mosfet atau jaringan jembatan IGBT, yang salurannya dikonfigurasi secara tepat dengan motor yang perlu dikontrol.
Gerbang mosfet / IGBT sisi rendah terintegrasi dengan pin IC2 # 3 dari tahap rangkaian generator PWM yang dibahas di atas untuk memulai injeksi PWM ke tahap mosfet jembatan. Regulasi ini pada akhirnya membantu motor untuk mendapatkan kecepatan yang diinginkan sesuai pengaturan (melalui preset 1 k pada diagram pertama).

Pada diagram berikut kami memvisualisasikan rangkaian pembangkit sinyal 3 fasa yang diperlukan.

Konfigurasi Sirkuit Generator 3-Fase
Generator 3 fase dibangun di sekitar beberapa chip CMOS CD4035 dan CD4009 yang menghasilkan sinyal 3 fase berdimensi akurat di seluruh pinout yang ditampilkan.
Frekuensi sinyal 3 fase tergantung pada jam input yang diumpankan yang harus 6 kali sinyal 3 fase yang diinginkan. Artinya, jika frekuensi 3 phase yang dibutuhkan adalah 50 Hz, maka input clock haruslah 50 x 6 = 300 Hz.
Ini juga menyiratkan bahwa jam di atas dapat bervariasi untuk memvariasikan frekuensi efektif IC driver yang pada gilirannya akan bertanggung jawab untuk memvariasikan frekuensi operasional motor.
Namun karena perubahan frekuensi di atas perlu dilakukan secara otomatis sebagai respons terhadap tegangan yang berubah-ubah, konverter tegangan ke frekuensi menjadi penting. Tahap selanjutnya membahas rangkaian konverter tegangan ke frekuensi sederhana yang akurat untuk implementasi yang diperlukan.
Cara Membuat Rasio V / F Konstan
Biasanya pada motor induksi, untuk menjaga efisiensi optimal dari kecepatan dan torsi motor, kecepatan slip atau kecepatan rotor perlu dikontrol yang pada gilirannya menjadi mungkin dengan mempertahankan rasio V / Hz yang konstan. Karena fluks magnet stator selalu konstan terlepas dari frekuensi suplai input, kecepatan rotor menjadi mudah dikontrol mempertahankan rasio V / Hz konstan .
Dalam mode loop terbuka, ini dapat dilakukan secara kasar dengan mempertahankan rasio V / Hz yang telah ditentukan, dan mengimplementasikannya secara manual. Misalnya pada diagram pertama, hal ini dapat dilakukan dengan menyesuaikan R1 dan preset 1K yang sesuai. R1 menentukan frekuensi dan 1K menyesuaikan RMS output, oleh karena itu dengan menyesuaikan dua parameter yang sesuai kita dapat menerapkan jumlah V / Hz yang diperlukan secara manual.
Namun untuk mendapatkan kontrol yang relatif akurat dari torsi dan kecepatan motor induksi, kita harus menerapkan strategi loop tertutup, di mana data kecepatan slip perlu diumpankan ke rangkaian pemrosesan untuk penyesuaian otomatis rasio V / Hz sehingga ini nilai selalu mendekati konstan.
Menerapkan Umpan Balik Loop Tertutup
Diagram pertama pada halaman ini dapat dimodifikasi secara sesuai untuk merancang regulasi V / Hz loop tertutup otomatis seperti yang ditunjukkan di bawah ini:

Pada gambar di atas, potensi pada pin # 5 dari IC2 menentukan lebar dari SPWM yang dibangkitkan pada pin # 3 dari IC yang sama. SPWM dihasilkan dengan membandingkan sampel riak utama 12V pada pin # 5 dengan gelombang segitiga pada pin # 7 dari IC2, dan ini diumpankan ke mosfet sisi rendah untuk kontrol motor.
Awalnya SPWM ini disetel pada beberapa level yang disesuaikan (menggunakan 1K perset) yang memicu gerbang IGBT sisi rendah dari jembatan 3-fase untuk memulai gerakan rotor pada level kecepatan nominal yang ditentukan.
Segera rotor rotor mulai berputar, tachometer terpasang dengan mekanisme rotor menyebabkan jumlah tegangan tambahan yang proporsional berkembang pada pin # 5 dari IC2, ini secara proporsional menyebabkan SPWM menjadi lebih lebar menyebabkan lebih banyak tegangan ke kumparan stator motor. Hal ini menyebabkan peningkatan lebih lanjut dalam kecepatan rotor yang menyebabkan lebih banyak tegangan pada pin # 5 dari IC2, dan ini berlangsung hingga tegangan ekuivalen SPWM tidak lagi dapat meningkat dan sinkronisasi rotor stator mencapai kondisi-mapan.
Prosedur di atas terus melakukan penyesuaian sendiri selama periode pengoperasian motor.
Cara Membuat dan Mengintegrasikan Tachometer
Desain takometer sederhana dapat dilihat pada diagram berikut, hal ini dapat diintegrasikan dengan mekanisme rotor sehingga frekuensi rotasinya mampu mengumpankan basis BC547.

Di sini data kecepatan rotor dikumpulkan dari sensor efek hall atau jaringan LED / Sensor IR dan diumpankan ke basis T1.
T1 berosilasi pada frekuensi ini dan mengaktifkan rangkaian tachometer yang dibuat dengan mengkonfigurasi rangkaian monostabil IC 555 secara tepat.
Output dari tachometer di atas bervariasi secara proporsional sebagai respons terhadap frekuensi input di dasar T1.
Ketika frekuensi naik, tegangan pada sisi kanan ekstrim, keluaran D3 juga naik dan sebaliknya, dan membantu menjaga rasio V / Hz ke tingkat yang relatif konstan.
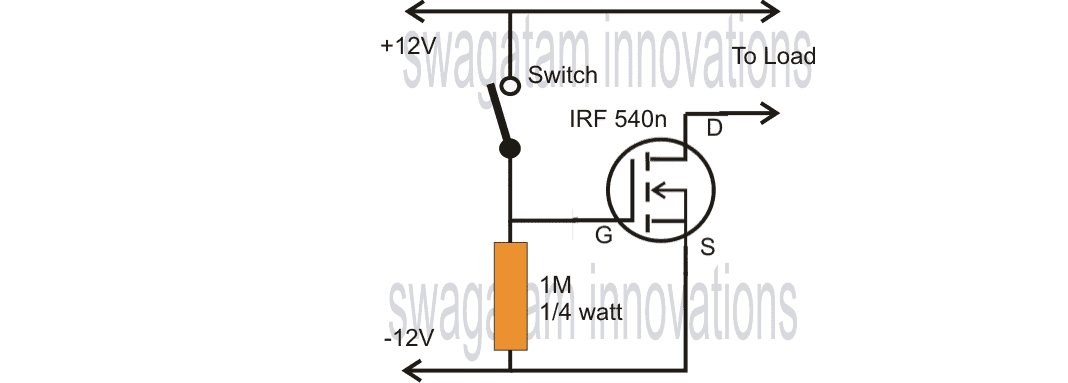
Bagaimana Mengontrol Kecepatan
Kecepatan motor yang menggunakan konstanta V / F dapat dicapai dengan mengubah input frekuensi pada input clock IC 4035. Hal ini dapat dicapai dengan memasukkan frekuensi variabel dari rangkaian astabil IC 555 atau rangkaian astabil standar apa pun ke input clock dari IC 4035.
Mengubah frekuensi secara efektif mengubah frekuensi operasi motor yang secara bersamaan menurunkan kecepatan slip.
Hal ini dideteksi oleh tachometer, dan tachometer secara proporsional mengurangi potensi pada pin # 5 dari IC2 yang secara proporsional mengurangi kandungan SPWM pada motor, dan akibatnya tegangan untuk motor berkurang, memastikan variasi kecepatan motor dengan benar rasio V / F yang dibutuhkan.
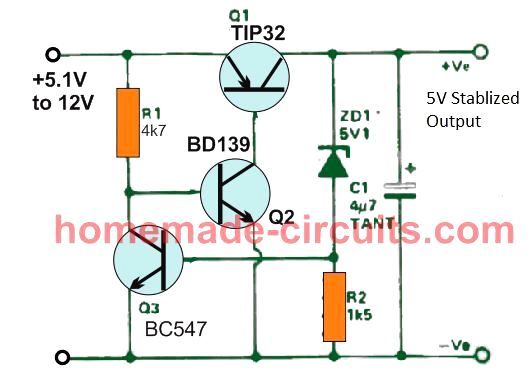
Konverter V ke F Buatan Sendiri

Dalam rangkaian konverter tegangan ke frekuensi di atas, IC 4060 digunakan dan resistansi yang bergantung pada frekuensi dipengaruhi melalui rakitan LED / LDR untuk konversi yang dimaksudkan.
Rakitan LED / LDR disegel di dalam kotak bukti cahaya, dan LDR ditempatkan pada resistor IC yang bergantung pada frekuensi 1M.
Karena respons LDR / LDR cukup linier, variasi iluminasi LED pada LDR menghasilkan frekuensi yang bervariasi (meningkat atau menurun) secara proporsional di pin3 IC.
FSD atau rentang V / Hz dari panggung dapat diatur dengan mengatur resistor 1M atau bahkan nilai C1 secara tepat.
LED adalah tegangan yang diturunkan dan diterangi melalui PWM dari tahap rangkaian PWM pertama. Ini menyiratkan bahwa karena PWM bervariasi, iluminasi LED juga akan bervariasi yang pada gilirannya akan meningkatkan frekuensi yang meningkat atau menurun secara proporsional pada pin3 dari IC 4060 pada diagram di atas.
Mengintegrasikan Konverter dengan VFD
Frekuensi yang bervariasi dari IC 4060 ini sekarang hanya perlu diintegrasikan dengan input jam IC CD4035 generator 3 fase.
Tahapan di atas merupakan bahan utama pembuatan rangkaian VFD 3 phase.
Sekarang, penting untuk membahas mengenai BUS DC yang diperlukan untuk memasok pengontrol motor IGBT dan prosedur pengaturan untuk keseluruhan desain.
BUS DC yang diterapkan melintasi rel jembatan-H IGBT dapat diperoleh dengan memperbaiki input listrik 3 fase yang tersedia menggunakan konfigurasi rangkaian berikut. Rel IGBT DC BUS terhubung melintasi titik-titik yang ditunjukkan sebagai 'beban'

Untuk sumber fasa tunggal perbaikan dapat diimplementasikan menggunakan konfigurasi jaringan jembatan 4 dioda standar.
Cara Mengatur rangkaian VFD 3 fasa yang diusulkan
Itu dapat dilakukan sesuai instruksi berikut:
Setelah menerapkan tegangan bus DC melintasi IGBT (tanpa motor terhubung), sesuaikan preset PWM 1k hingga tegangan yang melintasi rel menjadi sama dengan spesifikasi tegangan motor yang dimaksudkan.
Selanjutnya sesuaikan preset IC 4060 1M untuk menyesuaikan input IC IRS2330 mana pun ke tingkat frekuensi yang benar sesuai dengan spesifikasi motor yang diberikan.
Setelah prosedur di atas selesai, motor yang ditentukan dapat dihubungkan dan disuplai dengan level tegangan yang berbeda, parameter V / Hz dan dikonfirmasi untuk operasi V / Hz otomatis melalui motor yang terhubung.
Sepasang: Bagaimana Membangun Sirkuit Grow Light Berikutnya: Sirkuit Pelembut Air Dijelajahi