
Saat ini, robotika menjadi salah satu yang paling maju di bidang teknologi. Itu aplikasi robotika terutama terlibat dalam mobil, medis, konstruksi, pertahanan dan juga digunakan sebagai a robot pemadam kebakaran untuk membantu orang-orang dari kecelakaan kebakaran. Namun, mengendalikan robot dengan remote atau sakelar cukup rumit. Jadi, proyek baru dikembangkan yaitu, robot kontrol gerakan berbasis akselerometer. Tujuan utama dari proyek ini adalah untuk mengontrol pergerakan robot dengan gerakan tangan menggunakan akselerometer.

Robot Kontrol Gerakan berbasis akselerometer
Robot Kontrol Gerakan berbasis akselerometer
Proyek ini mencakup bagian pemancar dan bagian penerima. Itu komponen yang dibutuhkan Untuk membangun proyek ini adalah Ht12e, Ht12d, L293D, AT89S52, 7805, kapasitor, kristal, konektor PBT, antena kutub tunggal, resistor, LED, akselerometer dan baterai. Akselerometer adalah perangkat penting dalam proyek ini.
akselerometer atau perangkat pemancar tergantung pada gerakan tangan. Melalui perangkat pemancar, perintah diterima dan diproses dengan bantuan mikrokontroler At89S51. Ini mikrokontroler memberi sinyal ke robot untuk bergerak ke arah yang diinginkan. Prinsip kerja dasar robot ini mengatur sinyal data dari perangkat pemancar bacaan ke mikrokontroler yang dipasang di robot. Mikrokontroler yang telah terprogram berjalan sesuai dengan program, yang membuat robot bekerja sesuai dengan itu.
Robot yang dikendalikan gerakan menggunakan akselerometer adalah salah satu jenis robot yang dapat dioperasikan dengan gerakan tangan dengan meletakkan akselerometer di atasnya. Proyek ini dibagi menjadi dua bagian perangkat pemancar dan perangkat penerima. Dimana sebuah perangkat gestur berfungsi sebagai perangkat pemancar dan robot berfungsi sebagai perangkat penerima, ketika sebuah perangkat pemancar (akselerometer) diletakkan di tangan, maka ia akan mengirimkan sinyal ke robot untuk operasi yang diperlukan.
Komponen utama yang digunakan di bagian transmisi termasuk akselerometer, komparator, encoder IC HT12E dan Pemancar RF .
Akselerometer
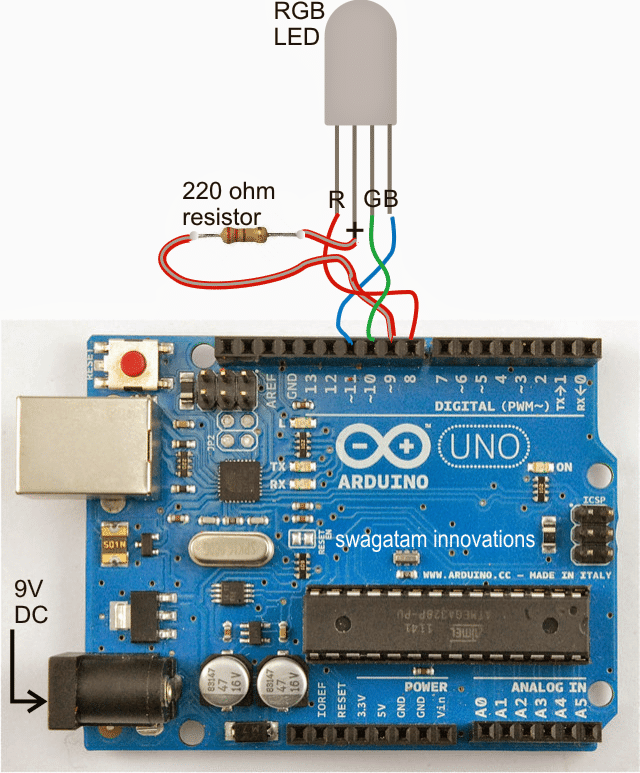
Akselerometer adalah salah satunya jenis sensor dan memberikan data analog saat bergerak ke arah X, Y, dan Z. Arah ini bergantung pada jenis sensor. Diagram akselerometer ditunjukkan di bawah ini. Sensor ini terdiri dari panah arah, jika kita memiringkan sensor ke satu arah, maka data pada pin tertentu akan berubah dalam bentuk analog. Akselerometer terdiri dari enam pin, dimana fungsi masing-masing pin dibahas di bawah ini.

Akselerometer
- Pin-1: Pin VDD digunakan untuk memberikan suplai + 5V ke pin ini
- Pin-2: Pin GND dihubungkan ke ground untuk tujuan biasing
- Pin-3: Pin X akan menerima data dalam arah X.
- Pin-4: Pin Y akan menerima data dalam arah Y.
- Pin-5: Pin Z akan menerima data ke arah Z.
- Pin-6: Pin ST digunakan untuk mengatur sensitivitas akselerometer 1.5g atau 2g atau 3g atau 4g
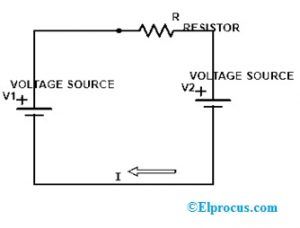
Pembanding
Komparator digunakan untuk mengubah tegangan analog menjadi tegangan digital dan membandingkan tegangan analog tersebut dengan tegangan referensi dan memberikan tegangan rendah atau tegangan tinggi yang tepat.
Pembuat enkode
Encoder ini digunakan untuk menyandikan data 4-bit dan mengirimkannya dengan menggunakan modul pemancar RF.
Modul Pemancar RF
Modul RF TX bekerja dengan frekuensi 433MHz dan modul ini dengan mudah tersedia di pasaran dengan biaya rendah
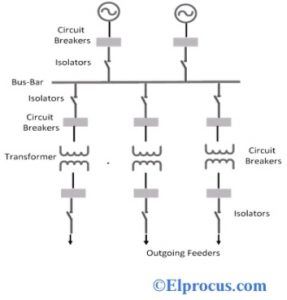
Komponen utama yang digunakan pada bagian penerima antara lain receiver, decoder, mikrokontroler dan driver motor.

Bagian Transmitter
Penerima RF
Penerima RF proyek ini akan menerima data yang ditransfer oleh perangkat pemancar.
Dekoder
Dekoder digunakan untuk mengubah data serial menjadi data paralel yang diterima dari modul penerima RF.
Mikrokontroler
Itu mikrokontroler adalah bagian terpenting dari robot. Mikrokontroler keluarga 8051 digunakan di sirkuit untuk memberikan kapasitas keputusan
Pengemudi Motor
Penggerak motor adalah alat yang memberikan gerakan untuk melakukan suatu tugas layaknya sebuah motor. Jadi kami membutuhkan pengemudi motor untuk menjalankannya melalui pengontrol. Antarmuka antara motor & mikrokontroler dapat dilakukan dengan menggunakan IC driver motor L293D pada rangkaian ini.
Pada bagian penerima, modul penerima RF menerima data dari pemancar. Data yang diterima dapat diterjemahkan oleh IC HT12D. Data yang diterima dapat diolah oleh mikrokontroler AT89S51 dan driver motor digunakan untuk mengontrol motor.

Bagian Penerima
Robot Kontrol Gerakan Bekerja
Robot yang dikendalikan gerakan berbasis akselerometer bergerak sesuai dengan gerakan tangan saat kami menempatkan akselerometer di tangan Anda. Saat kita memiringkan tangan dengan akselerometer di depan robot, maka robot mulai bergerak maju hingga diberikan gerakan selanjutnya. Saat kita memiringkan tangan ke arah belakang, maka robot berubah arah dan keadaannya. Kemudian mulai bergerak ke arah belakang sampai sinyal berikutnya diberikan. Saat kita memiringkan tangan ke kiri, lalu robot bergerak ke kiri hingga sinyal berikutnya diberikan, begitu pula saat kita memiringkan tangan di sisi kanan, robot bergerak ke kanan.
Aplikasi
Itu aplikasi akselerometer robot yang dikendalikan gerakan berbasis termasuk
- Robot ini digunakan dalam aplikasi militer untuk mengoperasikan robot
- Robot ini digunakan dalam aplikasi medis untuk tujuan pembedahan
- Robotika ini digunakan di bidang konstruksi
- Robotika ini digunakan di industri untuk mengontrol trolly dan lift.
Jadi, ini semua tentang robot kontrol gerakan berbasis Accelerometer, cara kerja dan aplikasinya. Kami berharap Anda memiliki pemahaman yang lebih baik tentang konsep ini. Selanjutnya, keraguan tentang konsep ini atau proyek elektronik , tolong beri tanggapan Anda dengan berkomentar di bagian komentar di bawah. Berikut pertanyaan untuk Anda, apa saja aplikasi robot kontrol gerakan berbasis akselerometer?
Kredit Foto:
- Robot Kontrol Gerakan berbasis akselerometer ytimg
- Akselerometer static.flickr




{kind=link}
{kind=link}