Dalam proyek ini kita akan belajar bagaimana membuat rangkaian driver motor stepper unipolar sederhana dengan menggunakan IC timer 555. Selain timer 555 kita juga membutuhkan IC CD 4017 yang merupakan IC penghitung dekade.
Oleh Ankit Negi
Motor unipolar apa pun dapat dihubungkan ke sirkuit ini untuk melakukan tugas tertentu, meskipun Anda perlu melakukan beberapa perubahan kecil terlebih dahulu.
Kecepatan motor stepper dapat dikontrol dari potensiometer yang terhubung antara debit dan ambang batas pin dari 555 timer .
Dasar-dasar Motor Stepper
Motor stepper digunakan di area di mana jumlah rotasi tertentu diperlukan, tidak dapat dicapai dengan menggunakan motor DC biasa. Aplikasi tipikal motor stepper ada dalam PRINTER 3D. Anda akan menemukan dua jenis motor stepper yang populer: UNIPOLAR dan BIPOLAR.
Seperti namanya motor stepper unipolar mengandung belitan dengan kabel biasa yang dapat dengan mudah diberi energi satu per satu.
Sedangkan motor stepper bipolar tidak memiliki terminal bersama antar kumparan karena itu tidak dapat digerakkan hanya dengan menggunakan rangkaian yang diusulkan. Untuk menggerakkan motor stepper bipolar kita membutuhkan rangkaian h-bridge.
KOMPONEN:
1. IC PEWAKTU 555

dua. CD 4017 IC

3. RESISTOR 4.7K, 1K


4. POTENTIOMETER 220K

5. 1 uf KAPASITOR

6. 4 DIODES 1N4007

7. 4 TRANSISTOR 2N2222

8. MOTOR LANGKAH UNIPOLAR

9. SUMBER DAYA DC
TUJUAN PENGATUR 555 TIMER:
Timer 555 diperlukan di sini untuk menghasilkan pulsa clock dengan frekuensi tertentu (dapat divariasikan menggunakan pot 220k) yang menentukan kecepatan motor stepper.
Rincian IC 555 Pinout

TUJUAN CD4017:
Seperti yang telah disebutkan di atas, ini adalah IC penghitung dekade yaitu, dapat menghitung hingga 10 pulsa clock. Apa yang membuat IC ini istimewa adalah ia memiliki dekoder bawaannya sendiri. Karena itu Anda tidak perlu menambahkan IC tambahan untuk mendekode bilangan biner.
4017 menghitung hingga 10 pulsa clock dari 555 jam dan memberikan output tinggi yang sesuai dengan setiap pulsa clock satu per satu dari 10 pin outputnya. Pada satu waktu hanya satu pin yang tinggi.
TUJUAN TRANSISTOR:
Ada dua kegunaan transistor disini:
1. Transistor bertindak seperti sakelar di sini, sehingga memberi energi pada satu kumparan pada satu waktu.
2. Transistor memungkinkan arus tinggi untuk melewatinya dan kemudian motor, sehingga tidak termasuk timer 555 sepenuhnya karena dapat menyuplai arus dalam jumlah yang sangat sedikit.
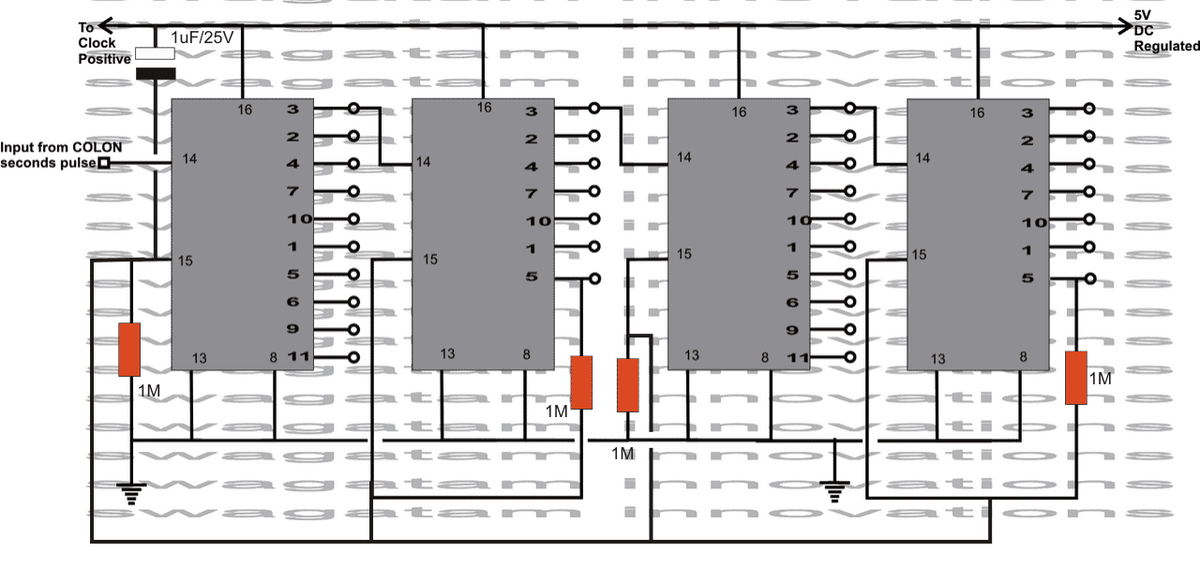
DIAGRAM SIRKUIT:

Buat koneksi seperti yang ditunjukkan pada gambar.
1. Hubungkan pin 3 atau pin keluaran timer 555 ke pin 14 (pin jam) dari IC 4017.
2. Hubungkan pin pengaktifan atau pin ke-13 dari 4017 ke ground.
3. Hubungkan pin 3,2,4,7 satu per satu ke transistor 1,2,3,4 masing-masing.
4. Hubungkan pin 10 dan 15 ke ground melalui resistor 1k.
5. Hubungkan kabel umum motor stepper ke suplai positif.
6. Hubungkan kabel lain dari motor stepper sedemikian rupa sehingga kumparan diberi energi satu per satu untuk menyelesaikan satu putaran penuh dengan benar. (Anda dapat melihat lembar data motor yang disediakan oleh pabrikan)
MENGAPA PIN OUTPUT 10 DARI IC 4017 TERHUBUNG KE PIN 15 (RESET PIN)?
Seperti yang telah disebutkan di atas, 4017 menghitung pulsa clock satu per satu hingga pulsa clock ke-10 dan memberikan output tinggi pada pin output yang sesuai, setiap pin output menjadi tinggi.
Hal ini menyebabkan penundaan tertentu dalam putaran motor yang tidak diperlukan. Karena kita hanya memerlukan empat pin pertama untuk satu putaran penuh motor atau empat angka desimal pertama dari o ke 3, pin no. 10 dihubungkan ke pin15 sehingga setelah hitungan ke-4 IC reset dan penghitungan dimulai dari awal lagi. Ini memastikan tidak ada gangguan pada putaran motor.
KERJA:
Setelah membuat koneksi dengan benar jika Anda menghidupkan motor sirkuit akan mulai berputar secara bertahap. Timer 555 menghasilkan pulsa clock tergantung pada nilai resistor, potensiometer dan kapasitor.
Jika Anda mengubah nilai salah satu dari tiga komponen frekuensi pulsa clock ini akan berubah.
Pulsa clock ini diberikan ke IC CD 4017 yang kemudian menghitung pulsa clock satu per satu dan memberikan 1 sebagai output ke pin no 3,2,4,7 masing-masing dan mengulangi proses ini secara terus menerus.
Karena transistor Q1 terhubung ke pin 3, maka transistor pertama dihidupkan kemudian transistor Q2 diikuti oleh Q3 dan Q4. Tetapi ketika satu transistor menyala, semua tetap mati.
Ketika Q1 aktif, ia bertindak seperti sakelar tertutup dan arus mengalir melalui kabel biasa ke kabel 1 dan kemudian ke ground melalui transistor Q1.
Ini memberi energi pada kumparan 1 dan motor berputar pada beberapa sudut yang bergantung pada frekuensi clock. Kemudian hal yang sama terjadi dengan Q2 yang memberi energi pada kumparan 2 diikuti oleh kumparan 3 dan kumparan 4. Dengan demikian diperoleh satu putaran penuh.
Saat potensiometer diputar:
Katakanlah posisi awal pot sedemikian rupa sehingga ada resistansi maksimum (220k) antara debit dan pin ambang. Rumus frekuensi pulsa clock output adalah:
F = 1,44 / (R1 + 2R2) C1
Jelas dari rumus bahwa frekuensi pulsa clock berkurang dengan meningkatnya nilai R2. Jadi ketika nilai R2 atau pot maksimum, frekuensi minimum karena IC 4017 menghitung lebih lambat dan memberikan output yang lebih tertunda.
Ketika nilai resistansi R2 menurun, frekuensi meningkat yang menyebabkan penundaan minimum antara output IC 4017. Dan karenanya motor stepper berputar lebih cepat.
Dengan demikian nilai potensiometer menentukan kecepatan motor stepper.
VIDEO SIMULASI:
Di sini Anda dapat dengan jelas melihat bagaimana kecepatan motor bervariasi dengan resistansi R2. Nilainya pertama-tama diturunkan dan kemudian ditingkatkan yang pada gilirannya pertama-tama meningkatkan dan kemudian menurunkan kecepatan motor stepper.
Sepasang: Cara Kerja Senter Engkol Berikutnya: Sirkuit Tachometer Arduino untuk Pembacaan Yang Tepat