Sirkuit yang memungkinkan motor yang terhubung untuk beroperasi searah jarum jam dan berlawanan arah jarum jam melalui pemicu input alternatif disebut rangkaian pengontrol dua arah.
Perancangan pertama dibawah ini membahas rangkaian pengendali motor Bidirectional berbasis jembatan Full atau H bridge dengan menggunakan 4 opamps dari IC LM324. Pada artikel kedua kita belajar tentang rangkaian pengontrol motor dua arah torsi tinggi menggunakan IC 556
pengantar
Umumnya, sakelar mekanis digunakan untuk mengatur arah putaran motor DC. Menyesuaikan polaritas tegangan yang digunakan dan motor berputar ke arah yang berlawanan!
Di satu sisi, ini mungkin memiliki kelemahan bahwa sakelar DPDT perlu ditambahkan untuk mengubah polaritas tegangan, tetapi kami hanya berurusan dengan sakelar yang membuat prosedurnya cukup mudah.
Namun DPDT mungkin memiliki satu masalah serius, Anda tidak disarankan untuk secara tiba-tiba membalikkan tegangan motor DC selama gerakan rotasinya. Hal ini dapat mengakibatkan lonjakan arus, yang mungkin dapat mematikan pengontrol kecepatan yang terkait.
Selain itu, segala jenis tekanan mekanis juga dapat menyebabkan masalah serupa. Sirkuit ini mengatasi komplikasi ini dengan mudah. Arah dan kecepatan dimanipulasi dengan bantuan potensiometer soliter. Memutar pot ke arah tertentu menyebabkan motor mulai berputar.
Mengalihkan pot ke arah yang berlawanan memungkinkan motor berputar dalam gerakan mundur. Posisi tengah pada pot mematikan motor, memastikan bahwa motor melambat terlebih dahulu dan kemudian berhenti sebelum upaya dilakukan untuk mengubah arah dilakukan.
Spesifikasi teknis
tegangan: Sirkuit dan motor memanfaatkan catu daya bersama. Ini menyiratkan bahwa karena tegangan kerja tertinggi dari LM324 adalah 32VDC ini juga menjadi tegangan maksimum yang dapat digunakan untuk mengoperasikan motor.
Arus: IRFZ44 MOSFET dirancang untuk 49A IRF4905 akan mampu menangani 74A. Namun trek PCB yang dijalankan dari pin MOSFET ke blok terminal sekrup hanya dapat mengatur sekitar 5A. Ini dapat diperbaiki dengan menyolder potongan kawat tembaga di atas jalur PCB.
Dalam hal ini, pastikan MOSFET tidak menjadi terlalu panas - jika terjadi, heatsink yang lebih besar akan diperlukan untuk dipasang pada perangkat ini.
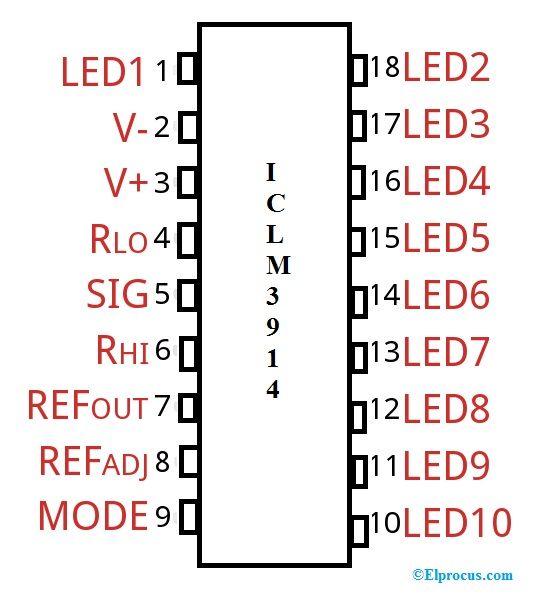
Pinout LM324

PENGENDALIAN BIDIREKSI MOTOR DC MENGGUNAKAN LM324
Pada dasarnya, Anda akan menemukan 3 cara untuk sesuaikan kecepatan motor DC :
1. Dengan menggunakan roda gigi mekanis untuk mencapai percepatan yang ideal: Pendekatan ini seringkali melampaui kenyamanan mayoritas peminat yang berlatih di bengkel rumahan.
2. Penurunan tegangan motor melalui resistor seri. Ini tentu tidak efisien (daya akan dihamburkan dalam resistor) dan juga mengakibatkan pengurangan torsi.
Arus yang dikonsumsi oleh motor juga meningkat dengan meningkatnya beban pada motor. Peningkatan arus berarti penurunan tegangan lebih pada resistor seri dan karenanya tegangan turun untuk motor.
Motor kemudian berusaha menarik arus yang lebih besar lagi, menyebabkan motor mati.
3. Dengan menerapkan seluruh tegangan suplai ke motor dalam bentuk pulsa pendek: Metode ini menghilangkan efek penurunan seri. Ini disebut sebagai modulasi lebar pulsa (PWM) dan merupakan strategi yang ditemukan di sirkuit ini. Denyut nadi cepat memungkinkan motor beroperasi perlahan, denyut yang diperpanjang memungkinkan motor bekerja lebih cepat.

BAGAIMANA FUNGSI ITU (lihat skema)
Sirkuit ini dapat dibagi dalam empat tahap:
1. Kontrol motorik - IC1: A
2. Generator gelombang segitiga - IC1: B
3. Pembanding tegangan - IC1: C dan D
4. Penggerak motor - Q3-6
Mari kita mulai dengan tahap driver motor, yang berpusat di sekitar MOSFET Q3-6. Hanya beberapa dari MOSFET ini yang tetap dalam keadaan aktif setiap saat. Sementara Q3 dan Q6 ON, arus bergerak melalui motor dan menyebabkannya berputar dalam satu arah.
Segera setelah Q4 dan Q5 dalam kondisi operasi, sirkulasi arus dibalik dan motor mulai berputar ke arah yang berlawanan. IC1: C dan IC1: D berurusan dengan mana MOSFET dinyalakan.
Opamps IC1: C dan IC1: D dihubungkan dengan kabel sebagai pembanding tegangan. Tegangan referensi untuk opamp ini dihasilkan oleh pembagi tegangan resistor R6, R7 dan R8.
Perhatikan bahwa tegangan referensi untuk IC1: D dipasang ke input '+' tetapi untuk IC1: C disambungkan ke input '-'.
Ini berarti IC1: D diaktifkan dengan tegangan lebih tinggi dari referensi sedangkan IC1: C diminta dengan tegangan lebih rendah dari referensi. Opamp IC1: B dikonfigurasi sebagai generator gelombang segitiga dan memasok sinyal aktivasi ke pembanding tegangan yang relevan.
Frekuensi kira-kira kebalikan dari konstanta waktu R5 dan C1 - 270Hz untuk nilai yang digunakan.
Penurunan R5 atau C1 meningkatkan frekuensi peningkatan salah satu dari ini akan mengurangi frekuensi. Tingkat keluaran puncak-ke-puncak dari gelombang segitiga jauh lebih kecil daripada perbedaan antara dua referensi tegangan.
Oleh karena itu, sangat sulit bagi kedua pembanding untuk diaktifkan pada saat yang bersamaan. Atau keempat MOSFET akan mulai berjalan, menyebabkan korsleting dan merusak semuanya.
Bentuk gelombang segitiga disusun di sekitar tegangan offset DC. Menaikkan atau menurunkan tegangan offset memvariasikan posisi pulsa gelombang segitiga secara tepat.
Mengalihkan gelombang segitiga ke atas memungkinkan pembanding IC1: D untuk mengaktifkan penurunan itu menghasilkan pembanding IC1: C untuk diaktifkan. Ketika level tegangan gelombang segitiga berada di tengah-tengah dua referensi tegangan maka tidak ada satupun pembanding yang diinduksi. Tegangan offset DC diatur oleh potensiometer P1 melalui IC1: A, yang dirancang sebagai pengikut tegangan.
Ini memberikan sumber tegangan impedansi keluaran rendah, memungkinkan tegangan offset DC menjadi kurang rentan terhadap dampak pembebanan IC1: B.
Saat 'pot' dinyalakan, tegangan offset DC mulai bervariasi, baik naik atau turun berdasarkan arah pot dibalik. Diode D3 menghadirkan pengaman polaritas terbalik untuk pengontrol.
Resistor R15 dan kapasitor C2 adalah filter low pass sederhana. Ini dimaksudkan untuk membersihkan semua lonjakan tegangan yang disebabkan oleh MOSFET saat mereka MENGAKTIFKAN daya suplai ke motor.
Daftar Bagian

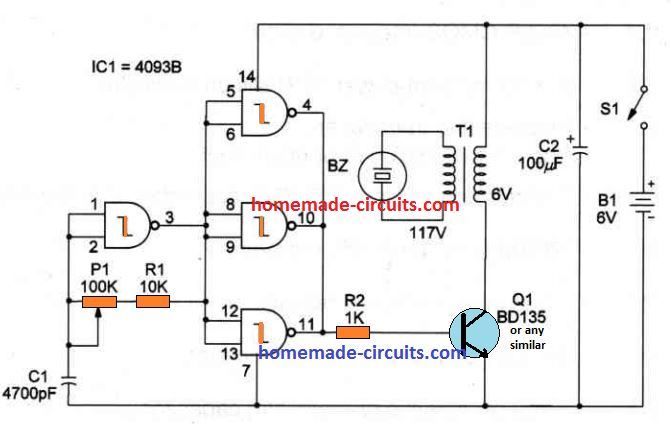
2) Kontrol Motor Dua Arah menggunakan IC 556
Kontrol kecepatan dan dua arah untuk motor DC relatif sederhana untuk diterapkan. Untuk motor yang diberi energi secara mandiri, kecepatannya, pada prinsipnya, merupakan fungsi linier dari tegangan suplai. Motor dengan magnet permanen adalah sub-kategori dari motor yang diberi energi sendiri, dan sering digunakan dalam mainan dan model.
Pada rangkaian ini, tegangan suplai motor divariasikan melalui modulasi lebar pulsa (PWM) yang memastikan efisiensi yang baik serta torsi yang relatif tinggi pada kecepatan motor rendah. Tegangan kendali tunggal antara 0 dan +10 V memungkinkan kecepatan motor untuk dibalik dan bervariasi dari nol hingga maksimum di kedua arah.
IC multivibrator astabil diatur sebagai osilator 80 Hz, dan menentukan frekuensi sinyal PWM. Sumber arus T1 mengisi Ca. Tegangan gigi gergaji di kapasitor ini dibandingkan dengan tegangan kontrol dalam 1C2, yang mengeluarkan sinyal PWM ke buffer N1-Na atau NPN1. Penggerak motor berbasis darlington adalah rangkaian jembatan yang mampu menggerakkan beban hingga 4 Amps, asalkan arus masuk tetap di bawah 5 Amps, dan pendinginan yang cukup disediakan untuk transistor daya T1 -T. Dioda D1, D5 memberikan perlindungan terhadap lonjakan induktif dari motor Switch S1 memungkinkan untuk membalikkan arah motor secara instan.

Gambar Prototipe



Previous: Memahami Sirkuit Amplifier Berikutnya: Cara Menghubungkan Transistor (BJT) dan MOSFET dengan Arduino