
Motor stepper adalah perangkat elektromekanis yang mengubah tenaga listrik menjadi tenaga mekanik. Juga, ini adalah motor listrik sinkron tanpa sikat yang dapat membagi putaran penuh menjadi sejumlah langkah yang ekspansif. Posisi motor dapat dikontrol secara akurat tanpa mekanisme umpan balik, selama ukuran motor sesuai dengan aplikasi. Motor stepper mirip dengan sakelar motor keengganan. Motor stepper menggunakan teori operasi magnet untuk membuat poros motor berbelok pada jarak yang tepat ketika pulsa listrik disediakan. Stator memiliki delapan kutub, dan rotor memiliki enam kutub. Rotor memerlukan 24 pulsa listrik untuk menggerakkan 24 langkah untuk membuat satu putaran penuh. Cara lain untuk mengatakan ini adalah bahwa rotor akan bergerak tepat 15 ° untuk setiap pulsa listrik yang diterima motor.
Prinsip Konstruksi & Kerja
Itu pembangunan motor stepper cukup terkait dengan a Motor DC . Ini termasuk magnet permanen seperti Rotor yang ada di tengah & akan berputar begitu gaya bekerja padanya. Rotor ini ditutup melalui no. dari stator yang dililitkan melalui kumparan magnet di atasnya. Stator disusun dekat dengan rotor sehingga medan magnet di dalam stator dapat mengontrol pergerakan rotor.

Motor Stepper
Motor stepper dapat dikontrol dengan memberi energi setiap stator satu per satu. Jadi stator akan menjadi magnet & bekerja seperti tiang elektromagnetik yang menggunakan energi tolak pada rotor untuk bergerak maju. Magnetisasi alternatif serta demagnetisasi stator akan menggeser rotor secara bertahap & memungkinkannya berputar dengan kontrol yang baik.
Itu prinsip kerja motor stepper adalah Elektro-Magnetisme. Ini termasuk rotor yang dibuat dengan magnet permanen sedangkan stator dengan elektromagnet. Setelah suplai diberikan ke belitan stator maka medan magnet akan dikembangkan di dalam stator. Sekarang rotor di motor akan mulai bergerak dengan medan magnet berputar dari stator. Jadi inilah prinsip kerja fundamental motor ini.

Konstruksi Stepper Motor
Di motor ini, ada besi lunak yang ditutup melalui stator elektromagnetik. Kutub stator dan rotor tidak bergantung pada jenis stepper. Setelah stator motor ini diberi energi maka rotor akan berputar untuk berbaris dengan stator jika tidak ternyata memiliki celah paling sedikit melalui stator. Dengan cara ini, stator diaktifkan secara seri untuk memutar motor stepper.
Teknik Mengemudi
Teknik mengemudi motor stepper s dapat dimungkinkan dengan beberapa sirkuit khusus karena desainnya yang rumit. Ada beberapa metode untuk menggerakkan motor ini, beberapa diantaranya dibahas di bawah ini dengan mengambil contoh motor stepper empat fasa.
Mode Eksitasi Tunggal
Metode dasar penggerak motor stepper adalah mode eksitasi tunggal. Ini adalah metode lama dan tidak banyak digunakan saat ini tetapi orang harus tahu tentang teknik ini. Dalam teknik ini setiap fase jika tidak, stator yang bersebelahan akan dipicu satu per satu secara alternatif dengan sirkuit khusus. Ini akan memagnetisasi & mendemagnetisasi stator untuk menggerakkan rotor ke depan.
Drive Langkah Penuh
Dalam teknik ini, dua stator diaktifkan pada satu waktu, bukan satu dalam periode waktu yang sangat singkat. Teknik ini menghasilkan torsi tinggi & memungkinkan motor menggerakkan beban tinggi.
Drive Setengah Langkah
Teknik ini cukup terkait dengan Full step drive karena kedua stator akan diatur bersebelahan sehingga akan diaktifkan terlebih dahulu sedangkan yang ketiga akan diaktifkan setelah itu. Siklus untuk mengganti dua stator pertama & setelah itu stator ketiga akan menggerakkan motor. Teknik ini akan menghasilkan resolusi yang lebih baik dari motor stepper sekaligus menurunkan torsi.
Melangkah Mikro
Teknik ini paling sering digunakan karena keakuratannya. Arus langkah variabel akan disuplai oleh rangkaian driver motor stepper menuju kumparan stator dalam bentuk gelombang sinusoidal. Akurasi setiap langkah dapat ditingkatkan dengan arus langkah kecil ini. Teknik ini banyak digunakan karena memberikan akurasi tinggi serta mengurangi kebisingan operasi untuk sebagian besar.
Sirkuit Motor Stepper & Pengoperasiannya
Motor stepper beroperasi secara berbeda dari Motor sikat DC , yang berputar ketika tegangan diterapkan ke terminalnya. Motor stepper, di sisi lain, secara efektif memiliki banyak elektromagnet bergigi yang diatur di sekitar sepotong besi berbentuk roda gigi pusat. Elektromagnet diberi energi oleh rangkaian kontrol eksternal, misalnya, mikrokontroler.

Sirkuit Motor Stepper
Untuk membuat poros motor berputar, pertama elektromagnet diberi daya, yang membuat gigi roda gigi tertarik secara magnetis ke gigi elektromagnet. Saat gigi roda gigi sejajar dengan elektromagnet pertama, gigi tersebut sedikit diimbangi dari elektromagnet berikutnya. Jadi ketika elektromagnet berikutnya DIHIDUPKAN dan yang pertama DIMATIKAN, roda gigi berputar sedikit agar sejajar dengan yang berikutnya dan dari sana proses diulang. Masing-masing rotasi kecil itu disebut langkah, dengan bilangan bulat langkah-langkah yang membuat putaran penuh.
Dengan begitu, motor bisa dibelokkan dengan tepat. Motor stepper tidak berputar terus menerus, mereka berputar secara bertahap. Ada 4 kumparan dengan 90atausudut antara satu sama lain tetap pada stator. Koneksi motor stepper ditentukan dengan cara kumparan saling berhubungan. Di motor stepper, kumparan tidak terhubung. Motor memiliki 90ataulangkah rotasi dengan kumparan yang diberi energi dalam urutan siklik, menentukan arah rotasi poros.
Kerja motor ini ditunjukkan dengan mengoperasikan sakelar. Kumparan diaktifkan secara seri dalam interval 1 detik. Poros berputar 90atausetiap kali kumparan berikutnya diaktifkan. Torsi kecepatan rendahnya akan bervariasi secara langsung dengan arus.
Jenis-jenis Motor Stepper
Ada tiga jenis utama motor stepper, yaitu:
- Stepper magnet permanen
- Stepper sinkron hibrida
- Variabel keengganan stepper
Motor Stepper Magnet Permanen
Motor magnet permanen menggunakan magnet permanen (PM) pada rotor dan beroperasi pada tarikan atau tolakan antara PM rotor dan elektromagnet stator.
Ini adalah jenis motor stepper yang paling umum dibandingkan dengan jenis motor stepper lain yang tersedia di pasaran. Motor ini termasuk magnet permanen dalam konstruksi motornya. Motor jenis ini juga dikenal sebagai motor kaleng / kaleng. Manfaat utama dari motor stepper ini adalah biaya produksi yang lebih sedikit. Untuk setiap revolusi, ada 48-24 langkah.
Variabel Reluktansi Motor Stepper
Motor reluktansi variabel (Variable Reluctance / VR) memiliki rotor besi polos dan beroperasi berdasarkan prinsip bahwa reluktansi minimum terjadi dengan celah minimum, sehingga titik-titik rotor tertarik ke arah kutub magnet stator.
Motor stepper seperti variabel keengganan adalah tipe dasar motor dan digunakan selama beberapa tahun terakhir. Seperti namanya, posisi sudut rotor terutama bergantung pada keengganan sirkuit magnetik yang dapat terbentuk di antara gigi stator dan juga rotor.
Motor Stepper Sinkron Hibrid
Motor stepper hibrida dinamai karena menggunakan kombinasi teknik magnet permanen (PM) dan variabel reluktansi (VR) untuk mencapai daya maksimum dalam ukuran kemasan kecil.
Jenis motor yang paling populer adalah motor stepper hybrid karena memberikan performa yang baik dibandingkan dengan rotor magnet permanen dalam hal kecepatan, resolusi langkah, dan torsi penahan. Tapi, motor stepper jenis ini lebih mahal dibandingkan dengan motor stepper magnet permanen. Motor ini menggabungkan fitur magnet permanen dan motor stepper keengganan variabel. Motor ini digunakan di mana sudut loncatan yang lebih sedikit diperlukan seperti 1,5, 1,8 & 2,5 derajat.
Bagaimana Cara Memilih Motor Stepper?
Sebelum memilih motor stepper untuk kebutuhan Anda, sangatlah penting untuk memeriksa kurva torsi-kecepatan motor. Jadi informasi ini tersedia dari perancang motor, dan ini adalah simbol grafis dari torsi motor pada kecepatan tertentu. Kurva kecepatan torsi motor harus sangat sesuai dengan kebutuhan aplikasi atau jika tidak, performa sistem yang diharapkan tidak dapat diperoleh.
Jenis Kabel
Motor stepper umumnya adalah motor dua fase seperti unipolar atau bipolar. Untuk setiap fasa dalam motor unipolar, terdapat dua belitan. Di sini, center-tap adalah kabel yang umum di antara dua belitan menuju tiang. Motor unipolar memiliki 5 sampai 8 lead.
Dalam konstruksi, di mana persekutuan dari dua kutub dibagi namun diketuk tengah, motor stepper ini mencakup enam kabel. Jika keran tengah dua kutub pendek di dalam, maka motor ini menyertakan lima kabel. Unipolar dengan 8 lead akan memfasilitasi koneksi seri & paralel sedangkan motor dengan lima lead atau enam lead memiliki koneksi seri kumparan stator. Pengoperasian motor unipolar dapat disederhanakan karena saat mengoperasikannya, tidak ada persyaratan untuk membalikkan aliran arus dalam rangkaian penggerak yang dikenal sebagai motor bifilar.
Dalam motor stepper bipolar, untuk setiap kutub, ada belitan tunggal. Arah suplai perlu diubah melalui rangkaian penggerak sehingga akan menjadi kompleks sehingga motor ini disebut motor unifilar.
Kontrol Motor Stepper dengan Memvariasikan Pulsa Jam
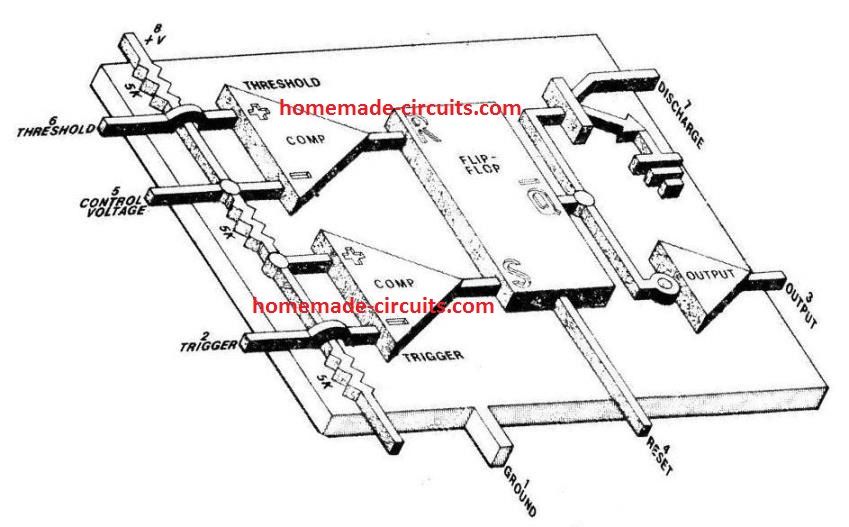
Kontrol motor stepper sirkuit adalah sirkuit sederhana dan berbiaya rendah, terutama digunakan dalam aplikasi daya rendah. Rangkaian tersebut ditunjukkan pada gambar, IC yang terdiri dari 555 timer sebagai multi vibrator yang stabil. Frekuensi dihitung dengan menggunakan hubungan yang diberikan.
Frekuensi = 1 / T = 1,45 / (RA + 2RB) C Dimana RA = RB = R2 = R3 = 4,7 kilo-ohm dan C = C2 = 100 µF.

Kontrol Motor Stepper dengan Memvariasikan Pulsa Jam
Output dari timer digunakan sebagai jam untuk dua flip-flop 7474 ganda 'D' (U4 dan U3) yang dikonfigurasi sebagai penghitung cincin. Ketika daya pada awalnya dinyalakan, hanya flip-flop pertama yang diatur (yaitu output Q pada pin 5 dari U3 akan berada pada logika '1') dan tiga flip-flop lainnya direset (yaitu output Q berada pada logika 0). Saat menerima pulsa clock, output logika '1' dari flip-flop pertama akan bergeser ke flip-flop kedua (pin 9 dari U3).
Jadi, output logika 1 terus bergeser secara melingkar dengan setiap pulsa clock. Output Q dari keempat flip-flop diperkuat oleh array transistor Darling-ton di dalam ULN2003 (U2) dan terhubung ke belitan motor stepper oranye, coklat, kuning, hitam ke 16, 15,14, 13 dari ULN2003 dan merah ke + ve pasokan.
Titik umum belitan terhubung ke suplai + 12V DC, yang juga terhubung ke pin 9 ULN2003. Kode warna yang digunakan untuk belitan dapat bervariasi dari satu merek ke merek lainnya. Ketika power dinyalakan, sinyal kontrol terhubung ke pin SET dari flip-flop pertama dan pin CLR dari tiga flip-flop lainnya menjadi aktif 'rendah' (karena rangkaian power-on-reset yang dibentuk oleh R1 -C1) untuk mengatur flip-flop pertama dan mengatur ulang tiga flip-flop yang tersisa.
Saat reset, Q1 dari IC3 menjadi 'high' sementara semua output Q lainnya menjadi 'low'. Reset eksternal dapat diaktifkan dengan menekan tombol reset. Dengan menekan sakelar reset, Anda dapat menghentikan motor stepper. Motor mulai berputar lagi ke arah yang sama dengan melepaskan sakelar reset.
Perbedaan antara Motor Stepper dan Motor Servo
Motor servo cocok untuk aplikasi torsi & kecepatan tinggi sedangkan motor stepper lebih murah sehingga digunakan di mana torsi penahan tinggi, akselerasi dengan kecepatan rendah hingga menengah, diperlukan fleksibilitas operasi loop terbuka atau tertutup. Perbedaan antara motor stepper dan motor servo meliputi yang berikut ini.
| Motor Stepper | Motor servo |
| Motor yang bergerak dalam langkah-langkah diskrit dikenal sebagai motor stepper. | Motor servo adalah salah satu jenis motor loop tertutup yang dihubungkan ke encoder untuk memberikan umpan balik kecepatan & posisi.
|
| Motor stepper digunakan di mana kontrol, serta presisi, adalah prioritas utama | Motor servo digunakan dimana kecepatan adalah prioritas utama
|
| Jumlah tiang keseluruhan dari motor stepper berkisar dari 50 hingga 100 | Jumlah tiang keseluruhan motor servo berkisar dari 4 hingga 12 |
| Dalam sistem loop tertutup, motor ini bergerak dengan pulsa yang konsisten | Motor ini membutuhkan encoder untuk mengubah pulsa untuk mengontrol posisi.
|
| Torsi tinggi dalam kecepatan lebih rendah | Torsi rendah dalam kecepatan tinggi |
| Waktu pemosisian lebih cepat melalui pukulan pendek | Waktu pemosisian lebih cepat selama pukulan panjang |
| Gerakan inersia dengan toleransi tinggi | Gerakan inersia dengan toleransi rendah |
| Motor ini cocok untuk mekanisme kekakuan rendah seperti katrol dan sabuk | Tidak cocok untuk mekanisme yang tidak terlalu kaku |
| Responsivitas tinggi | Responsivitas rendah |
| Ini digunakan untuk beban berfluktuasi | Ini tidak digunakan untuk beban yang berfluktuasi |
| Penyesuaian penguatan / penyetelan tidak diperlukan | Penyesuaian penguatan / penyetelan diperlukan |
Motor Stepper vs Motor DC
Baik motor stepper dan motor DC digunakan dalam aplikasi industri yang berbeda tetapi perbedaan utama antara kedua motor ini agak membingungkan. Di sini, kami mencantumkan beberapa karakteristik umum antara kedua desain ini. Setiap karakteristik dibahas di bawah ini.
Karakteristik | Motor Stepper | Motor DC |
| Karakteristik Kontrol | Sederhana dan menggunakan mikrokontroler | Sederhana dan tidak perlu ekstra |
| Kisaran kecepatan | Rendah dari 200 hingga 2000 RPM | Moderat |
| Keandalan | Tinggi | Moderat |
| Efisiensi | Rendah | Tinggi |
| Karakteristik Torsi atau Kecepatan | Torsi Tertinggi dengan Kecepatan Lebih Sedikit | Torsi Tinggi dengan Kecepatan Lebih Sedikit |
| Biaya | Rendah | Rendah |
Parameter Motor Stepper
Parameter motor stepper terutama mencakup sudut langkah, langkah untuk setiap putaran, langkah untuk setiap detik, dan RPM.
Langkah Sudut
Sudut langkah motor stepper dapat didefinisikan sebagai sudut di mana rotor motor berputar setelah satu pulsa diberikan ke input stator. Resolusi motor dapat didefinisikan sebagai jumlah langkah motor dan jumlah putaran rotor.
Resolusi = Jumlah Langkah / Jumlah Revolusi Rotor
Pengaturan motor dapat ditentukan melalui sudut langkah & dinyatakan dalam derajat. Resolusi motor (nomor langkah) adalah no. langkah-langkah yang membuat dalam satu putaran rotor. Ketika step-angle motor kecil maka resolusinya tinggi untuk susunan motor ini.
Ketepatan pengaturan objek melalui motor ini terutama tergantung pada resolusinya. Begitu resolusinya tinggi maka akurasinya akan rendah.
Beberapa motor akurasi dapat membuat 1000 langkah dalam satu putaran termasuk 0,36 derajat sudut langkah. Motor tipikal mencakup 1,8 derajat sudut langkah dengan 200 langkah untuk setiap putaran. Sudut langkah yang berbeda seperti 15 derajat, 45 derajat, dan 90 derajat sangat umum pada motor normal. Jumlah sudut dapat berubah dari dua menjadi enam dan sudut langkah kecil dapat dicapai melalui bagian tiang berlubang.
Langkah-Langkah untuk Setiap Revolusi
Langkah-langkah untuk setiap resolusi dapat didefinisikan sebagai jumlah sudut langkah yang diperlukan untuk revolusi total. Rumusnya adalah 360 ° / Step Angle.
Langkah untuk Setiap Detik
Parameter semacam ini terutama digunakan untuk mengukur jumlah langkah yang tercakup dalam setiap detik.
Revolusi per Menit
RPM adalah revolusi per menit. Ini digunakan untuk mengukur frekuensi revolusi. Jadi dengan menggunakan parameter ini, kita dapat menghitung jumlah putaran dalam satu menit. Hubungan utama antara parameter motor stepper adalah seperti berikut.
Langkah untuk Setiap Detik = Revolusi per Menit x Langkah per Revolusi / 60
Stepper Motor Interfacing dengan Mikrokontroler 8051
Antarmuka motor stepper dengan 8051 sangat sederhana dengan menggunakan tiga mode seperti penggerak gelombang, penggerak langkah penuh & penggerak setengah langkah dengan memberikan 0 & 1 ke empat kabel motor berdasarkan mode penggerak mana yang harus kita pilih untuk menjalankan motor ini.
Dua kabel yang tersisa harus digabungkan ke suplai tegangan. Di sini digunakan motor stepper unipolar dimana keempat ujung kumparan dihubungkan ke empat pin primer port-2 di mikrokontroler menggunakan ULN2003A.
Mikrokontroler ini tidak menyuplai arus yang cukup untuk menggerakkan kumparan sehingga IC driver saat ini menyukai ULN2003A. ULN2003A harus digunakan dan merupakan kumpulan 7 pasang transistor NPN Darlington. Perancangan pasangan Darlington dapat dilakukan melalui dua transistor bipolar yang dihubungkan untuk mencapai amplifikasi arus maksimum.
Pada IC driver ULN2003A, pin input 7, pin output 7, di mana dua pin untuk catu daya & terminal Ground. Di sini pin 4-input & 4-output digunakan. Sebagai alternatif untuk ULN2003A, IC L293D juga digunakan untuk penguatan arus.
Anda perlu mengamati dua kabel umum & empat kabel koil dengan sangat hati-hati atau motor stepper tidak akan berputar. Hal ini dapat diamati dengan mengukur resistansi melalui multimeter tetapi multimeter tidak akan menampilkan bacaan apa pun di antara dua fase kabel. Setelah kabel biasa & dua kabel lainnya berada dalam fase yang sama maka itu harus menunjukkan resistansi yang sama sedangkan dua titik akhir kumparan dalam fase yang sama akan menunjukkan resistansi ganda dibandingkan dengan resistansi di antara titik bersama serta satu titik akhir.
Penyelesaian masalah
- Troubleshooting adalah proses untuk mengecek status motor apakah motor bekerja atau tidak. Daftar periksa berikut digunakan untuk memecahkan masalah motor stepper.
- Pertama, verifikasi koneksi serta kode rangkaian.
- Jika tidak apa-apa, selanjutnya periksa apakah motor mendapat suplai tegangan yang tepat atau motor hanya bergetar tetapi tidak berputar.
- Jika suplai tegangan baik, maka verifikasi titik akhir dari empat koil yang dihubungkan dengan IC ULN2003A.
- Pertama, temukan dua titik akhir umum & perbaiki ke suplai 12v, setelah itu pasang sisa empat kabel ke IC ULN2003A. Sampai motor stepper menyala, coba semua kombinasi yang mungkin. Jika penyambungan ini tidak tepat maka motor ini akan bergetar menggantikan putaran.
Bisakah Motor Stepper Berjalan Secara Terus Menerus?
Umumnya semua motor berjalan atau berputar terus menerus tetapi sebagian besar motor tidak dapat berhenti ketika sedang di bawah daya, Ketika Anda mencoba untuk membatasi poros motor saat berada di bawah catu daya maka akan terbakar atau putus.
Alternatifnya, motor stepper didesain untuk membuat step diskrit, kemudian tunggu disana lagi step dan diam disana. Jika kita ingin membuat motor tetap berada di satu lokasi untuk waktu yang lebih singkat sebelum melangkah lagi maka akan terlihat seperti berputar terus menerus. Konsumsi daya motor ini tinggi tetapi disipasi daya terutama terjadi setelah motor dihentikan atau dirancang dengan buruk, maka ada kemungkinan panas berlebih. Karena alasan ini, suplai arus motor sering kali berkurang setelah motor berada dalam posisi bertahan untuk waktu yang lebih lama.
Alasan utamanya adalah, setelah motor berputar, bagian daya listrik inputnya dapat diubah menjadi tenaga mekanik. Ketika motor berhenti saat sedang berputar, maka semua daya input dapat diubah menjadi panas di bagian dalam koil.
Keuntungan
Itu kelebihan motor stepper termasuk yang berikut ini.
- Kekasaran
- Konstruksi sederhana
- Dapat bekerja dalam sistem kontrol loop terbuka
- Perawatan rendah
- Ini berfungsi dalam situasi apa pun
- Keandalannya tinggi
- Sudut putaran motor sebanding dengan pulsa input.
- Motor memiliki torsi penuh saat berhenti.
- Pemosisian dan pengulangan gerakan yang tepat karena motor stepper yang baik memiliki akurasi 3 - 5% langkah dan kesalahan ini tidak kumulatif dari satu langkah ke langkah berikutnya.
- Respon yang sangat baik untuk memulai, menghentikan, dan membalikkan.
- Sangat andal karena tidak ada sikat kontak di motor. Oleh karena itu umur motor hanya bergantung pada umur bearing.
- Respons motor terhadap pulsa input digital menyediakan kontrol loop terbuka, membuat motor lebih sederhana dan lebih murah untuk dikontrol.
- Dimungkinkan untuk mencapai rotasi sinkron berkecepatan sangat rendah dengan beban yang secara langsung digabungkan ke poros.
- Berbagai kecepatan rotasi dapat diwujudkan karena kecepatan sebanding dengan frekuensi pulsa input.
Kekurangan
Itu kerugian dari motor stepper termasuk yang berikut ini.
- Efisiensi rendah
- Torsi motor akan menurun dengan cepat seiring dengan kecepatan
- Akurasinya rendah
- Umpan balik tidak digunakan untuk menentukan kemungkinan langkah yang terlewat
- Torsi Kecil Menuju Rasio Inersia
- Sangat Berisik
- Jika motor tidak dikendalikan dengan baik maka resonansi dapat terjadi
- Pengoperasian motor ini tidak mudah pada kecepatan yang sangat tinggi.
- Sirkuit kontrol khusus diperlukan
- Dibandingkan dengan motor DC, ia menggunakan lebih banyak arus
Aplikasi
Itu aplikasi motor stepper termasuk yang berikut ini.
- Mesin Industri - Motor stepper digunakan dalam pengukur otomotif dan peralatan produksi otomatis perkakas mesin.
- Keamanan - produk pengawasan baru untuk industri keamanan.
- Medis - Motor stepper digunakan di dalam pemindai medis, sampler, dan juga ditemukan di dalam fotografi gigi digital, pompa cairan, respirator, dan mesin analisis darah.
- Elektronik Konsumen - Motor stepper di kamera untuk fungsi fokus dan zoom kamera digital otomatis.
Dan juga memiliki aplikasi mesin bisnis, aplikasi periferal komputer.
Jadi, ini semua tentang gambaran tentang motor stepper seperti konstruksi, prinsip kerja, perbedaan, kelebihan, kekurangan, dan penerapannya. Sekarang Anda telah mendapat gambaran tentang jenis motor super dan aplikasinya jika Anda memiliki pertanyaan tentang topik ini atau kelistrikan dan proyek elektronik tinggalkan komentar di bawah.
Kredit Foto
- Stepper Motor oleh MST





![Sirkuit Bunga LED Berkilauan [Efek Lampu LED Warna-warni]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)

{kind=link}