
Seperti namanya, artikel ini akan memberikan gambaran yang tepat tentang struktur dan cara kerja pengontrol PID. Namun membahas detailnya, mari kita dapatkan pengantar tentang pengontrol PID. Pengontrol PID ditemukan dalam berbagai aplikasi untuk kontrol proses industri. Kira-kira 95% dari operasi loop tertutup dari otomasi industri sektor menggunakan pengontrol PID. PID adalah singkatan dari Proportional-Integral-Derivative. Ketiga pengontrol ini digabungkan sedemikian rupa sehingga menghasilkan sinyal kendali. Sebagai pengontrol umpan balik, ia memberikan keluaran kontrol pada tingkat yang diinginkan. Sebelum mikroprosesor ditemukan, kontrol PID diimplementasikan oleh komponen elektronik analog. Tapi hari ini semua pengontrol PID diproses oleh mikroprosesor. Pengontrol logika yang dapat diprogram juga memiliki instruksi pengontrol PID bawaan. Karena fleksibilitas dan keandalan pengontrol PID, ini biasanya digunakan dalam aplikasi kontrol proses.
Apa itu Pengontrol PID?
Istilah PID adalah singkatan dari proporsional integral derivative dan merupakan salah satu jenis perangkat yang digunakan untuk mengontrol variabel proses yang berbeda seperti tekanan, aliran, suhu, dan kecepatan dalam aplikasi industri. Dalam pengontrol ini, perangkat umpan balik loop kontrol digunakan untuk mengatur semua variabel proses.
Jenis kontrol ini digunakan untuk menggerakkan sistem ke arah lokasi yang obyektif jika tidak datar. Ini hampir di mana-mana untuk kontrol suhu dan digunakan dalam proses ilmiah, otomatisasi & berbagai bahan kimia. Dalam pengontrol ini, umpan balik loop tertutup digunakan untuk mempertahankan keluaran nyata dari metode seperti dekat dengan tujuan atau keluaran pada titik tetap jika memungkinkan. Dalam artikel ini, desain pengontrol PID dengan mode kontrol yang digunakan di dalamnya seperti P, I & D dibahas.
Sejarah
Sejarah pengendali PID adalah, Pada tahun 1911, pengendali PID pertama kali dikembangkan oleh Elmer Sperry. Setelah itu, TIC (Taylor Instrumental Company) menerapkan pengontrol pneumatik bekas dengan benar-benar merdu pada tahun 333. Setelah beberapa tahun, teknisi kontrol menghilangkan kesalahan kondisi-mapan yang ditemukan dalam pengontrol proporsional melalui penyetelan ulang akhir ke beberapa nilai palsu hingga kesalahan tidak nol.
Penyetelan ulang ini termasuk kesalahan yang dikenal sebagai pengontrol proporsional-integral. Setelah itu, pada tahun 1940, kontroler PID pneumatik pertama dikembangkan melalui aksi turunan untuk mengurangi masalah overshooting.
Pada tahun 1942, Ziegler & Nichols telah memperkenalkan aturan tuning untuk menemukan dan mengatur parameter yang sesuai dari pengontrol PID oleh para insinyur. Akhirnya, pengontrol PID otomatis banyak digunakan di industri pada pertengahan tahun 1950.
Diagram Blok Pengontrol PID
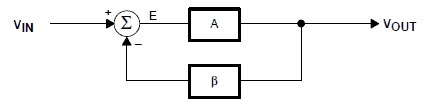
Sistem loop tertutup seperti pengontrol PID menyertakan sistem kontrol umpan balik. Sistem ini mengevaluasi variabel umpan balik menggunakan titik tetap untuk menghasilkan sinyal kesalahan. Berdasarkan itu, itu mengubah keluaran sistem. Prosedur ini akan berlanjut hingga kesalahan mencapai Nol jika tidak, nilai variabel umpan balik menjadi setara dengan titik tetap.
Pengontrol ini memberikan hasil yang baik dibandingkan dengan pengontrol tipe ON / OFF. Dalam pengontrol tipe ON / OFF, hanya dua kondisi yang dapat diperoleh untuk mengelola sistem. Setelah nilai proses lebih rendah dari titik tetap, maka itu akan ON. Demikian pula, ini akan MATI setelah nilainya lebih tinggi dari nilai tetap. Outputnya tidak stabil dalam pengontrol jenis ini dan akan sering berayun di wilayah titik tetap. Namun, pengontrol ini lebih stabil & akurat dibandingkan dengan pengontrol tipe ON / OFF.

Cara kerja pengontrol PID
Cara Kerja Kontroler PID
Dengan penggunaan pengontrol ON-OFF sederhana berbiaya rendah, hanya dua status kontrol yang dimungkinkan, seperti ON sepenuhnya atau OFF sepenuhnya. Ini digunakan untuk aplikasi kontrol terbatas di mana kedua status kontrol ini cukup untuk tujuan kontrol. Namun sifat berosilasi dari kontrol ini membatasi penggunaannya dan oleh karena itu digantikan oleh pengontrol PID.
Kontroler PID mempertahankan output sedemikian rupa sehingga tidak ada kesalahan antara variabel proses dan setpoint / output yang diinginkan oleh operasi loop tertutup. PID menggunakan tiga perilaku kontrol dasar yang dijelaskan di bawah ini.
P- Pengontrol
Proportional atau P- controller memberikan output yang sebanding dengan kesalahan arus e (t). Ini membandingkan titik yang diinginkan atau ditetapkan dengan nilai aktual atau nilai proses umpan balik. Kesalahan yang dihasilkan dikalikan dengan konstanta proporsional untuk mendapatkan keluaran. Jika nilai kesalahannya nol, maka keluaran pengontrol ini adalah nol.

Pengontrol-P
Pengontrol ini membutuhkan biasing atau reset manual saat digunakan sendiri. Ini karena tidak pernah mencapai kondisi mapan. Ini menyediakan operasi yang stabil tetapi selalu mempertahankan kesalahan kondisi-mapan. Kecepatan respon meningkat ketika konstanta proporsional Kc meningkat.

Respons Pengontrol-P
I-Controller
Karena keterbatasan p-controller di mana selalu ada offset antara variabel proses dan setpoint, diperlukan I-controller, yang menyediakan tindakan yang diperlukan untuk menghilangkan kesalahan kondisi-mapan. Ini mengintegrasikan kesalahan selama periode waktu hingga nilai kesalahan mencapai nol. Ini memegang nilai ke perangkat kontrol terakhir di mana kesalahan menjadi nol.

Pengontrol PI
Kontrol integral menurunkan outputnya ketika terjadi kesalahan negatif. Ini membatasi kecepatan respons dan memengaruhi stabilitas sistem. Kecepatan respons ditingkatkan dengan mengurangi penguatan integral, Ki.

Respons Pengontrol PI
Pada gambar di atas, karena penguatan pengontrol-I berkurang, kesalahan kondisi-mapan juga terus menurun. Untuk sebagian besar kasus, pengontrol PI digunakan terutama di mana respons kecepatan tinggi tidak diperlukan.
Saat menggunakan pengontrol PI, keluaran pengontrol-I terbatas pada rentang tertentu untuk mengatasi angin integral kondisi di mana keluaran integral terus meningkat bahkan pada keadaan kesalahan nol, karena nonlinier di pabrik.
Pengontrol-D
Pengontrol-I tidak memiliki kemampuan untuk memprediksi perilaku error di masa mendatang. Jadi ia bereaksi secara normal setelah setpoint diubah. D-controller mengatasi masalah ini dengan mengantisipasi perilaku kesalahan di masa mendatang. Outputnya tergantung pada tingkat perubahan kesalahan terhadap waktu, dikalikan dengan konstanta turunan. Ini memberikan tendangan awal untuk output sehingga meningkatkan respons sistem.

Pengontrol PID
Pada gambar di atas, respon D, pengontrol lebih banyak, dibandingkan dengan pengontrol PI, dan waktu penyelesaian output berkurang. Ini meningkatkan stabilitas sistem dengan mengkompensasi fase lag yang disebabkan oleh I-controller. Meningkatkan perolehan turunan akan meningkatkan kecepatan respons.

Respons Pengontrol PID
Jadi akhirnya kami mengamati bahwa dengan menggabungkan ketiga pengontrol ini, kami bisa mendapatkan respons yang diinginkan untuk sistem. Pabrikan yang berbeda merancang algoritme PID yang berbeda.
Jenis Kontroler PID
Pengontrol PID diklasifikasikan menjadi tiga jenis seperti pengontrol tipe ON / OFF, proporsional, dan standar. Kontroler ini digunakan berdasarkan sistem kontrol, pengguna dapat menggunakan kontroler untuk mengatur metode.
Kontrol HIDUP / MATI
Metode kontrol on-off adalah jenis perangkat paling sederhana yang digunakan untuk kontrol suhu. Output perangkat mungkin ON / OFF melalui tidak ada status tengah. Kontroler ini akan MENGAKTIFKAN output hanya setelah suhu melewati titik tetap. Pengontrol batas adalah salah satu jenis pengontrol ON / OFF yang menggunakan relai pengunci. Relai ini disetel ulang secara manual dan digunakan untuk mematikan metode setelah suhu tertentu tercapai.
Kontrol Proporsional
Pengontrol jenis ini dirancang untuk menghilangkan siklus yang terhubung melalui kontrol ON / OFF. Kontroler PID ini akan mengurangi daya normal yang disuplai ke pemanas setelah suhu mencapai titik tetap.
Kontroler ini memiliki satu fitur untuk mengontrol heater agar tidak melebihi titik tetap namun akan mencapai titik tetap untuk menjaga suhu tetap.
Tindakan proporsional ini dapat dicapai dengan MENGAKTIFKAN & MENONAKTIFKAN output untuk periode waktu kecil. Proporsi waktu ini akan mengubah rasio dari waktu ON ke waktu OFF untuk mengontrol suhu.
Kontroler PID Tipe Standar
Kontroler PID semacam ini akan menggabungkan kontrol proporsional melalui kontrol integral & turunan untuk secara otomatis membantu unit mengkompensasi modifikasi dalam sistem. Modifikasi, integral & turunan ini dinyatakan dalam satuan berbasis waktu.
Pengontrol ini juga dirujuk melalui timbal baliknya, RATE & RESET sesuai. Ketentuan PID harus disesuaikan secara terpisah jika tidak disetel ke sistem tertentu dengan uji coba dan juga kesalahan. Pengontrol ini akan menawarkan kontrol yang paling tepat dan stabil dari 3 jenis pengontrol.
Pengontrol PID Waktu Nyata
Saat ini, ada berbagai macam pengontrol PID yang tersedia di pasaran. Pengontrol ini digunakan untuk persyaratan kontrol industri seperti tekanan, suhu, level, dan aliran. Setelah parameter ini dikontrol melalui PID, pilihan terdiri dari menggunakan pengontrol PID terpisah atau PLC.
Pengontrol terpisah ini digunakan di mana pun satu atau dua loop diperlukan untuk diperiksa serta dikendalikan sebaliknya dalam kondisi di mana pun itu rumit di sebelah kanan masuk melalui sistem yang lebih besar.
Perangkat kontrol ini memberikan pilihan berbeda untuk kontrol solo & twin loop. Pengontrol PID tipe mandiri menyediakan beberapa konfigurasi titik tetap untuk menghasilkan beberapa alarm otonom.
Pengontrol mandiri ini terutama terdiri dari pengontrol PID dari Honeywell, pengontrol suhu dari Yokogawa, pengontrol autotune dari pengontrol OMEGA, Siemens, dan ABB.
PLC digunakan seperti pengontrol PID di sebagian besar aplikasi kontrol industri. Pengaturan blok PID dapat dilakukan di dalam PAC atau PLC untuk memberikan pilihan yang lebih baik untuk kontrol PLC yang tepat. Pengontrol ini lebih pintar dan juga kuat dibandingkan dengan pengontrol terpisah. Setiap PLC menyertakan blok PID dalam pemrograman perangkat lunak.
Metode Tuning
Sebelum pengontrol PID bekerja, harus disetel agar sesuai dengan dinamika proses yang akan dikontrol. Desainer memberikan nilai default untuk istilah P, I, dan D, dan nilai ini tidak dapat memberikan kinerja yang diinginkan dan terkadang menyebabkan ketidakstabilan dan kinerja kontrol yang lambat. Berbagai jenis metode penyetelan dikembangkan untuk menyetel pengontrol PID dan memerlukan banyak perhatian dari operator untuk memilih nilai terbaik dari perolehan proporsional, integral, dan turunan. Beberapa di antaranya diberikan di bawah ini.
Pengontrol PID digunakan di sebagian besar aplikasi industri tetapi orang harus mengetahui pengaturan pengontrol ini untuk menyesuaikannya dengan benar untuk menghasilkan keluaran yang diinginkan. Di sini, penyetelan tidak lain adalah prosedur menerima balasan ideal dari pengontrol melalui pengaturan keuntungan proporsional terbaik, faktor integral & turunan.
Output yang diinginkan dari pengontrol PID dapat diperoleh dengan menyetel pengontrol. Ada berbagai teknik yang tersedia untuk mendapatkan keluaran yang diperlukan dari pengontrol seperti trial & error, Zeigler-Nichols & kurva reaksi proses. Metode yang paling sering digunakan adalah trial & error, Zeigler-Nichols, dll.
Metode Percobaan dan Kesalahan: Ini adalah metode sederhana penyetelan pengontrol PID. Saat sistem atau pengontrol berfungsi, kita dapat menyetel pengontrol. Dalam metode ini, pertama, kita harus menetapkan nilai Ki dan Kd menjadi nol dan meningkatkan suku proporsional (Kp) hingga sistem mencapai perilaku osilasi. Setelah berosilasi, sesuaikan Ki (suku Integral) sehingga osilasi berhenti dan akhirnya sesuaikan D untuk mendapatkan respons yang cepat.
Teknik Kurva Reaksi Proses: Ini adalah teknik tuning loop terbuka. Ini menghasilkan respons ketika input langkah diterapkan ke sistem. Awalnya, kami harus menerapkan beberapa keluaran kontrol ke sistem secara manual dan harus mencatat kurva respons.
Setelah itu, kita perlu menghitung kemiringan, waktu mati, waktu naik kurva, dan akhirnya mengganti nilai-nilai ini dalam persamaan P, I, dan D untuk mendapatkan nilai perolehan suku PID.

Proses kurva reaksi
Metode Zeigler-Nichols: Zeigler-Nichols mengusulkan metode loop tertutup untuk menyetel pengontrol PID. Itu adalah metode siklus kontinu dan metode osilasi teredam. Prosedur untuk kedua metode sama tetapi perilaku osilasi berbeda. Dalam hal ini, pertama, kita harus mengatur konstanta p-controller, Kp ke nilai tertentu sementara nilai Ki dan Kd adalah nol. Penguatan proporsional ditingkatkan hingga sistem berosilasi pada amplitudo konstan.
Keuntungan di mana sistem menghasilkan osilasi konstan disebut penguatan akhir (Ku) dan periode osilasi disebut periode akhir (Pc). Setelah tercapai, kita dapat memasukkan nilai-nilai P, I, dan D dalam pengontrol PID dengan tabel Zeigler-Nichols tergantung pada pengontrol yang digunakan seperti P, PI atau PID, seperti gambar di bawah ini.

Tabel Zeigler-Nichols
Struktur Pengontrol PID
Kontroler PID terdiri dari tiga suku yaitu kontrol proporsional, integral, dan turunan. Operasi gabungan dari ketiga pengontrol ini memberikan strategi kontrol untuk pengendalian proses. Pengontrol PID memanipulasi variabel proses seperti tekanan, kecepatan, suhu, aliran, dll. Beberapa aplikasi menggunakan pengontrol PID dalam jaringan bertingkat di mana dua atau lebih PID digunakan untuk mencapai kontrol.

Struktur Kontroler PID
Gambar di atas menunjukkan struktur pengontrol PID. Ini terdiri dari blok PID yang memberikan outputnya ke blok proses. Proses / pabrik terdiri dari perangkat kontrol akhir seperti aktuator, katup kontrol, dan perangkat kontrol lainnya untuk mengontrol berbagai proses industri / pabrik.
Sinyal umpan balik dari pabrik proses dibandingkan dengan titik setel atau sinyal referensi u (t) dan sinyal kesalahan e (t) yang sesuai diumpankan ke algoritma PID. Menurut perhitungan kontrol proporsional, integral, dan turunan dalam algoritme, pengontrol menghasilkan respons gabungan atau keluaran terkontrol yang diterapkan ke perangkat kontrol pabrik.
Semua aplikasi kontrol tidak membutuhkan ketiga elemen kontrol tersebut. Kombinasi seperti kontrol PI dan PD sangat sering digunakan dalam aplikasi praktis.
Aplikasi
Aplikasi pengontrol PID meliputi berikut ini.
Aplikasi pengontrol PID terbaik adalah pengatur suhu dimana pengontrol menggunakan masukan dari sensor suhu & keluarannya dapat digabungkan dengan elemen pengatur seperti kipas atau pemanas. Umumnya, pengontrol ini hanyalah salah satu elemen dalam sistem kontrol suhu. Seluruh sistem harus diperiksa serta dipertimbangkan saat memilih pengontrol yang tepat.
Kontrol Suhu Tungku
Umumnya, tungku digunakan untuk memasukkan pemanas serta menampung sejumlah besar bahan mentah pada suhu yang sangat tinggi. Biasanya material yang ditempati menyertakan massa yang sangat besar. Akibatnya, dibutuhkan inersia dalam jumlah tinggi & suhu material tidak berubah dengan cepat bahkan saat diterapkan panas yang sangat besar. Fitur ini menghasilkan sinyal PV yang cukup stabil & memungkinkan periode Derivatif untuk mengoreksi kesalahan secara efisien tanpa perubahan ekstrim baik pada FCE atau CO.
Pengontrol Pengisian MPPT
Karakteristik V-I dari sel fotovoltaik terutama bergantung pada kisaran suhu serta radiasi. Berdasarkan kondisi cuaca, arus dan tegangan operasi akan terus berubah. Jadi, sangatlah penting untuk melacak PowerPoint tertinggi dari sistem fotovoltaik yang efisien. Pengontrol PID digunakan untuk mencari MPPT dengan memberikan tegangan dan arus tetap ke pengontrol PID. Setelah kondisi cuaca berubah maka pelacak menjaga arus dan tegangan tetap stabil.
Konverter Elektronik Daya
Kita tahu bahwa konverter adalah aplikasi elektronika daya, sehingga pengontrol PID banyak digunakan dalam konverter. Setiap kali konverter disatukan melalui sistem berdasarkan perubahan dalam beban, maka keluaran konverter akan berubah. Misalnya, inverter digabungkan dengan beban, arus besar disuplai begitu beban dinaikkan. Dengan demikian, parameter tegangan dan arus tidak stabil, tetapi akan berubah sesuai kebutuhan.
Dalam keadaan ini, pengontrol ini akan menghasilkan sinyal PWM untuk mengaktifkan IGBT inverter. Berdasarkan perubahan beban, sinyal respon diberikan ke kontroler PID sehingga akan menghasilkan n error. Sinyal-sinyal ini dihasilkan berdasarkan sinyal gangguan. Dalam keadaan ini, kita dapat memperoleh input & output yang dapat diubah melalui inverter serupa.
Penerapan Kontroler PID: Kontrol Loop Tertutup untuk motor DC Brushless
Antarmuka Pengontrol PID
Perancangan dan interfacing dari pengontrol PID dapat dilakukan dengan menggunakan mikrokontroler Arduino. Di laboratorium, pengontrol PID berbasis Arduino dirancang dengan menggunakan board Arduino UNO, komponen elektronik, thermoelectric cooler, sedangkan bahasa pemrograman perangkat lunak yang digunakan dalam sistem ini adalah C atau C ++. Sistem ini digunakan untuk mengontrol suhu di dalam laboratorium.
Parameter PID untuk pengontrol tertentu ditemukan secara fisik. Fungsi berbagai parameter PID dapat diimplementasikan melalui kontras berikutnya antara berbagai bentuk pengontrol.
Sistem antarmuka ini dapat secara efisien menghitung suhu melalui kesalahan ± 0,6 ℃ sedangkan suhu konstan mengatur hanya melalui perbedaan kecil dari nilai yang disukai dicapai. Konsep yang digunakan dalam sistem ini akan memberikan teknik yang murah dan tepat untuk mengelola parameter fisik dalam kisaran yang disukai di dalam laboratorium.
Oleh karena itu, artikel ini membahas gambaran umum dari kontroler PID yang meliputi history, diagram blok, struktur, tipe, cara kerja, metode tuning, interfacing, keunggulan, dan aplikasi. Kami berharap kami dapat memberikan pengetahuan dasar namun tepat tentang pengontrol PID. Ini pertanyaan sederhana untuk Anda semua. Di antara metode penyetelan yang berbeda, metode mana yang lebih disukai digunakan untuk mencapai kerja optimal dari kontroler PID dan mengapa?
Anda diminta untuk memberikan jawaban Anda di bagian komentar di bawah ini.
Kredit Foto
Diagram blok pengontrol PID oleh wikimedia
Struktur pengontrol PID, pengontrol P, P - tanggapan pengontrol & pengontrol PID oleh blog.opticontrols
P - respon pengontrol oleh controls.engin.umich
PI- respon pengontrol oleh daging
Tanggapan Pengontrol PID oleh wikimedia
Tabel Zeigler-Nichols oleh controls.engin




{kind=link}
{kind=link}
{kind=link}
{kind=link}