pengantar
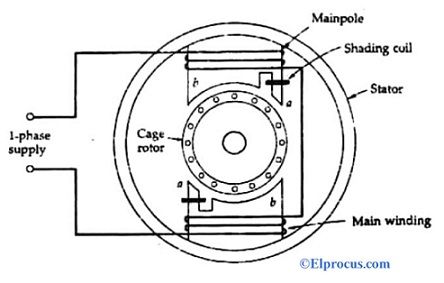
Motor induksi fase tunggal banyak digunakan dalam peralatan dan kontrol industri. Motor induksi fase tunggal Kapasitor Split Permanen (PSC) adalah motor jenis ini yang paling sederhana dan paling banyak digunakan.
Secara desain, motor PSC bersifat searah, artinya dirancang untuk berputar ke satu arah. Dengan menambahkan belitan ekstra, dan relai dan sakelar eksternal, atau dengan menggunakan mekanisme roda gigi, arah putaran dapat diubah. Pada ide kali ini akan dibahas secara detail bagaimana cara mengontrol kecepatan motor PSC kedua arah menggunakan mikrokontroler PIC16F72 dan elektronika daya.
Mikrokontroler PIC16F72 dipilih karena ini adalah salah satu mikrokontroler tujuan umum yang paling sederhana dan berbiaya rendah yang dimiliki Microchip dalam portofolionya. Meskipun tidak memiliki PWM dalam perangkat keras untuk menggerakkan keluaran PWM pelengkap dengan pita mati yang dimasukkan, semua PWM dihasilkan dalam firmware menggunakan pengatur waktu dan keluaran ke pin keluaran untuk keperluan umum.
Apa itu Penggerak Frekuensi Variabel?
Variable Frequency Drive atau VFD adalah cara yang memungkinkan pengontrolan kecepatan motor induksi dengan menerapkan frekuensi tegangan suplai AC yang bervariasi. Dengan mengontrol frekuensi AC keluaran, dimungkinkan untuk menggerakkan motor pada kecepatan yang berbeda berdasarkan kebutuhan. Ini adalah penggerak kecepatan yang dapat disesuaikan yang sebagian besar digunakan dalam aplikasi industri seperti pompa, sistem ventilasi, elevator, penggerak peralatan mesin, dll. Pada dasarnya, ini adalah sistem hemat energi. Oleh karena itu, persyaratan pertama adalah menghasilkan gelombang sinus dengan frekuensi berbeda untuk VFD.
Apa teknologi yang diadopsi dalam PKS?
Merupakan sistem yang memberikan keluaran AC dengan frekuensi yang bervariasi untuk mengontrol kecepatan motor sesuai dengan kebutuhan. Inverter Frekuensi Variabel Fase Tunggal lebih umum karena sebagian besar perangkat bekerja dalam suplai AC fase tunggal. Ini terdiri dari penyearah jembatan gelombang penuh untuk mengubah AC 230/110 Volt menjadi sekitar 300/150 volt DC. Output DC dari penyearah jembatan dihaluskan oleh kapasitor penghalus bernilai tinggi untuk menghilangkan riak AC. DC tegangan tetap ini kemudian diumpankan ke rangkaian pembangkit frekuensi yang dibentuk dari transistor MOSFET (Metal oxide field effect transistor) / IGBT (Isolated Gate Bipolar Transistor). Rangkaian MOSFET / IGBT ini menerima DC dan mengubahnya menjadi AC dengan frekuensi variabel untuk mengontrol kecepatan perangkat.
Perubahan frekuensi dapat dilakukan dengan menggunakan rangkaian elektronik atau Mikrokontroler. Sirkuit ini memvariasikan frekuensi tegangan (PWM) yang diterapkan ke drive gerbang dari sirkuit MOSFET / IGBT. Jadi tegangan AC dari frekuensi yang berbeda-beda muncul pada keluaran. Mikrokontroler dapat diprogram untuk mengubah frekuensi keluaran sesuai dengan kebutuhan.
Sistem PKS:
Perangkat Frekuensi Variabel memiliki tiga bagian seperti motor AC, Pengontrol, dan antarmuka Operasi.
Motor AC yang digunakan pada VFD umumnya merupakan motor induksi tiga fasa walaupun satu fasa mesin digunakan di beberapa sistem. Motor yang dirancang untuk operasi kecepatan tetap umumnya digunakan, tetapi beberapa desain motor menawarkan kinerja yang lebih baik di VFD daripada desain standar.
Bagian Controller adalah rangkaian konverter daya elektronik padat untuk mengubah AC menjadi DC dan kemudian menjadi AC gelombang sinus kuasi. Bagian pertama adalah bagian konverter AC ke DC yang memiliki jembatan penyearah gelombang penuh biasanya berupa jembatan gelombang penuh tiga fase / fase tunggal. Intermediate DC ini kemudian diubah menjadi AC gelombang sinus kuasi menggunakan rangkaian switching inverter. Di sini transistor MOSFET / IGBT digunakan untuk membalikkan DC ke AC.
Bagian inverter mengubah DC menjadi tiga saluran AC untuk menggerakkan motor tiga fase. Bagian Kontroler juga dapat dirancang untuk memberikan faktor daya yang ditingkatkan, distorsi harmonik yang lebih sedikit, dan sensitivitas yang rendah untuk memasukkan transien AC.
Pengontrol volt / Hz:
Rangkaian pengontrol mengatur frekuensi AC yang disuplai ke motor melalui metode kontrol volt per hertz. Motor AC membutuhkan tegangan yang diterapkan variabel ketika frekuensi berubah untuk memberikan torsi yang ditentukan. Misalnya, jika motor dirancang untuk bekerja pada 440 volt pada 50Hz, maka AC yang diterapkan pada motor harus dikurangi menjadi setengah (220 volt) ketika frekuensi berubah menjadi setengah (25Hz). Peraturan ini didasarkan pada Volt / Hz. Dalam kasus di atas, rasionya adalah 440/50 = 8,8 V / Hz.
 Metode pengontrol tegangan lainnya:
Metode pengontrol tegangan lainnya:
 Metode pengontrol tegangan lainnya:
Metode pengontrol tegangan lainnya:Selain pengontrolan Volts / Hz, metode yang lebih canggih seperti Direct Torque Control atau DTC, Modulasi Lebar Pulsa Vektor Ruang (SVPWM) , dll juga digunakan untuk mengontrol kecepatan motor. Dengan mengontrol tegangan pada motor, fluks magnet dan torsi dapat dikontrol dengan tepat. Dalam metode PWM, sakelar inverter menghasilkan gelombang sinus semu melalui serangkaian pulsa sempit dengan durasi pulsa bervariasi Pseudo sinusoidal.
Antarmuka Operasi:
Bagian ini memungkinkan pengguna untuk menghidupkan / mematikan motor dan mengatur kecepatan. Fasilitas lainnya termasuk pembalikan motor, perpindahan antara kontrol kecepatan manual dan otomatis, dll. Antarmuka operasi terdiri dari panel dengan tampilan atau indikator dan meter untuk menunjukkan kecepatan motor, tegangan yang diberikan, dll. Seperangkat sakelar keypad umumnya disediakan untuk mengontrol sistem.
Inbuilt -Soft Start:
Pada motor induksi biasa, yang dihidupkan menggunakan sakelar AC, arus yang ditarik jauh lebih tinggi daripada nilai pengenal dan dapat meningkat dengan bertambahnya percepatan beban untuk mencapai kecepatan penuh motor.
Di sisi lain, pada motor yang dikendalikan VFD, awalnya tegangan rendah pada frekuensi rendah diterapkan. Frekuensi dan tegangan ini meningkat dengan kecepatan yang terkendali untuk mempercepat beban. Ini mengembangkan torsi hampir lebih banyak daripada nilai pengenal motor.
Pergantian Motor PKS :
Frekuensi dan tegangan yang diterapkan pertama-tama dikurangi ke tingkat yang terkontrol dan kemudian terus menurun hingga menjadi nol dan motor mati.
Rangkaian Aplikasi untuk mengontrol kecepatan Motor Induksi Fase Tunggal
Pendekatannya relatif mudah sejauh menyangkut sirkuit daya dan sirkuit kontrol. Di sisi input, pengganda tegangan digunakan dan di sisi output digunakan jembatan-H, atau inverter 2-fase, seperti yang ditunjukkan pada Gambar 2. Salah satu ujung belitan utama dan awal dihubungkan ke masing-masing setengah jembatan dan ujung lainnya terhubung ke titik netral catu daya AC.
Rangkaian kontrol membutuhkan empat PWM dengan dua pasangan komplementer dengan pita mati yang cukup antara keluaran komplementer. Band mati PWM adalah PWM0-PWM1 dan PWM2-PWM3. PIC16F72 tidak memiliki PWM yang dirancang di perangkat keras untuk menghasilkan seperti yang kita butuhkan. Mengenai VF, bus dc disintesis dengan memvariasikan frekuensi dan amplitudo. Ini akan memberikan dua tegangan sinus keluar dari fase.
Jika tegangan yang diterapkan ke belitan utama tertinggal dari belitan awal sebesar 90 derajat, motor berjalan dalam satu arah (yaitu, maju). Jika kita ingin mengubah arah putaran maka tegangan yang diterapkan pada belitan utama adalah untuk melakukan belitan awal.
Saya harap Anda mendapat gambaran tentang penggerak frekuensi variabel untuk motor induksi dari artikel di atas. jadi jika Anda memiliki pertanyaan tentang konsep ini atau kelistrikan dan proyek elektronik silakan tinggalkan bagian komentar di bawah.