Artikel tersebut menjelaskan rangkaian kendaraan pengikut garis sederhana, juga dikenal sebagai kendaraan pelacak garis, hanya menggunakan beberapa op amp dan beberapa komponen lainnya, tanpa menggunakan Arduino atau mikrokontroler yang rumit.
Apa itu Kendaraan Line Follower
Kendaraan pengikut garis adalah bentuk Kendaraan Pemandu Otomatis (AGV) yang berjalan dengan mendeteksi garis putih yang ditarik atau tertanam di tanah. Sinyal dari detektor memerintahkan roda bermotor untuk secara otomatis berbelok dan menyesuaikan sesuai dengan garis sehingga memberikan kesan bahwa kendaraan sedang mengikuti garis tersebut. Karenanya nama pengikut garis.
Pada dasarnya detektor itu berbentuk resistor foto seperti LDR atau detektor cahaya semikonduktor seperti dioda foto atau transistor foto .
Beberapa seperti itu detektor cahaya digunakan untuk mendeteksi cahaya yang dipantulkan dari garis putih dan mengaktifkan rangkaian transistorized atau pembanding berbasis op amp, yang selanjutnya mengontrol motor roda kendaraan untuk bermanuver sesuai dengan belokan dan kurva garis putih di tanah.
Menggunakan Pembanding Jendela
Di sirkuit kendaraan pengikut garis yang diusulkan, kami telah menggunakan beberapa pembanding op amp melibatkan motor ke dalam tindakan penyeimbangan.
Op amp dipasang sebagai jendela pembagi . Seperti namanya, pembanding jendela membandingkan sinyal input dari detektor dengan dua referensi tegangan ekstrim yang membentuk ambang 'jendela'. Selama level sinyal input berada dalam ambang referensi 'jendela' ini, output dari kedua op amp mempertahankan logika tinggi di seluruh outputnya.
Namun, jika sinyal input cenderung melewati ambang referensi, output op amp yang relevan berubah menjadi rendah, sehingga menghasilkan output yang berlawanan dari op amp. Ketidakseimbangan ini mendorong perangkat keluaran untuk memperbaiki situasi dengan mengalihkan beban secara tepat.
Bagaimana Sirkuit Bekerja
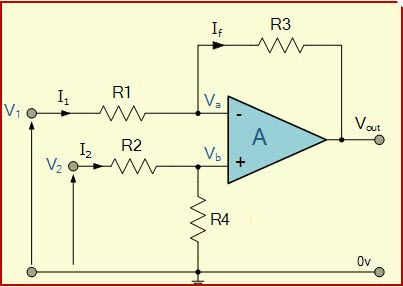
Mengacu pada diagram rangkaian kendaraan pengikut garis di bawah ini, kita dapat melihat dua op amp yang dikonfigurasi sebagai penyusun jendela.

Op amp bisa dari IC LM358 atau LM324
Op amp atas disambungkan untuk mengontrol batas ambang atas, sedangkan op amp bawah dihubungkan untuk mengontrol batas ambang bawah.
Input pembalik op amp A1 dan input non-pembalik dari op amp A2 dijepit dengan tegangan referensi tetap
Input non-pembalik dari op amp A1, dan input pembalik dari op amp A2 diikat bersama dan digunakan untuk merasakan variasi sinyal input dari detektor cahaya.
Dua Light Dependent Resistor, LDR1 dan LDR2 yang bertindak seperti perangkat peka cahaya diposisikan sebagai detektor cahaya, sehingga keduanya menerima cahaya pantulan dari garis putih secara seragam.
Selama cahaya pada LDR cukup tinggi dan seragam, pin3 A1 tetap lebih tinggi dari pada pin2, karena LDR1 dipasang dengan garis positif. Hal ini menyebabkan outputnya menjadi tinggi.
Demikian juga, pin6 A2 ditahan lebih rendah dari pin5 karena koneksi LDR2 dengan garis ground, dan ini memungkinkan output A2 tetap tinggi.
Dengan kata lain, ketika LDR menyala secara seragam, input non-inverting (+) dari kedua op amp ditahan lebih tinggi daripada input inverting (-) yang menyebabkan outputnya menjadi tinggi.
Dengan kedua keluaran yang tinggi, driver transistor menjaga motor masing-masing berjalan secara seragam, yang memungkinkan kendaraan untuk berjalan mulus di garis lurus.
Bagaimana Kendaraan Mengikuti Garis
Ketika garis lengkung putih ditemui, salah satu LDR menyimpang dari garis menyebabkan perbedaan cahaya pada titik A sirkuit. Hal ini selanjutnya menyebabkan keluaran op amp yang relevan menjadi rendah dan motor yang bersangkutan berhenti sejenak.
Dalam situasi ini, motor sisi lain yang masih beroperasi memaksa kendaraan untuk berbelok ke arah sudut tekukan garis, yang membawa LDR yang teduh kembali ke wilayah garis putih yang diterangi. Ketika ini terjadi, kedua motor kembali beroperasi sehingga memungkinkan kendaraan berjalan normal.
Pengalihan ON / OFF otomatis di atas melintasi motor kiri / kanan sebagai respons terhadap variasi cahaya dari garis putih yang bengkok memaksa kendaraan untuk terus menyesuaikan dan bermanuver sesuai dengan garis putih.
Bagaimana Membangun Kendaraan
Dalam salah satu posting saya sebelumnya, kita belajar bagaimana a kendaraan kendali jarak jauh sederhana dapat dibangun dengan hanya menggunakan beberapa motor yang dipasang di tepi belakang papan persegi panjang, dan sepasang roda tiruan di tepi depan papan.

Untuk sirkuit kendaraan pengikut garis yang diusulkan juga, kami menggunakan konstruksi serupa untuk kendaraan, seperti yang diperlihatkan pada gambar di atas.
Penataannya terlihat cukup sederhana, roda belakang dipasangi motor yang dikendalikan oleh driver transistor yang melintasi keluaran op amp.
Ketika kendaraan menyimpang dari garis, perbedaan level cahaya pada LDR mematikan salah satu op amp, menghentikan motor yang bersangkutan.
Hal ini memaksa motor sisi berlawanan yang sedang beroperasi, berbelok ke sisi motor yang terhenti, artinya jika motor sisi kiri direm, kendaraan akan dipaksa untuk berbelok ke kiri, menyesuaikan dengan garis tekuk, ke arah yang sama.
Hal ini juga menunjukkan bahwa integrasi motor kiri / kanan dengan keluaran op amp harus dilakukan secara tepat sehingga arah tekukan garis dan motor yang sedang dihentikan berada pada sisi kendaraan yang sama.
Bagaimana Memposisikan LDR
Karena dua LDR (LDR1 dan LDR2) seharusnya merasakan cahaya yang dipantulkan dari garis putih secara seragam, orientasinya harus tegak lurus dengan panjang garis, seperti yang ditunjukkan di bawah ini.

Di sini, kami mengasumsikan kendaraan berjalan dari kanan ke kiri, mengikuti garis di jalur yang sama.
Lebar total LDR harus sesuai dengan lebar garis.
LDR dan LED harus dipasang di permukaan bawah kendaraan, dan sebaiknya di sisi belakang, tepat di bawah set roda belakang.
LED yang ditunjukkan adalah LED putih dengan resistor seri 1K. Itu harus diposisikan dekat dengan LDR dan di tengah, memastikan bahwa cahaya dari LDR tidak mencapai LDR secara langsung, sebaliknya cahaya harus mencapai LDR dengan refleksi dari garis putih di bawahnya.
Spesifikasi Motor
Motor dapat berupa jenis sikat magnet permanen, tetapi harus dilengkapi dengan kotak roda gigi untuk memastikan pergerakan kendaraan lambat dan stabil dengan tepat.
Nilai daya motor harus sesuai dengan beban yang seharusnya dibawa kendaraan. Ini dapat diuji melalui beberapa eksperimen praktis.
Cara Mengatur
Untuk mengatur sirkuit kendaraan pengikut garis ini, Anda harus mengatur strip kecil garis putih yang dicat pada permukaan datar, atau selotip putih menempel pada permukaan datar.
Posisikan sistem (tanpa roda) di atas garis, seperti yang ditunjukkan pada diagram sebelumnya, sehingga LDR dan LED disesuaikan dengan benar di dalam lebar garis.
AKTIFKAN daya, LED putih harus menerangi area di bawahnya dengan terang. Sesuaikan kedua preset hingga kedua motor dinyalakan secara bersamaan.
Sekarang geser unit sedikit ke kanan sehingga LDR1 keluar dari garis putih.
Motor kiri harus berhenti. Jika tidak maka setel P1 sampai motor kiri berhenti begitu saja.
Selanjutnya, pindahkan unit sedikit ke kiri sehingga LDR2 keluar dari garis putih. Ini harus menghentikan motor sisi kanan. Jika tidak, maka sesuaikan preset 10k hingga motor sisi kanan berhenti begitu saja.
Ini akan menyelesaikan prosedur penyiapan dan sekarang Anda dapat memasang roda pada motor dan menggunakan kendaraan berpemandu ini untuk secara otomatis mengikuti lintasan yang diletakkan di tanah.
Garis Putih vs Garis Hitam
Sistem kendaraan pengikut garis yang diusulkan didasarkan pada garis putih yang tertanam di tanah, bukan garis hitam. Keuntungan menggunakan garis putih daripada garis hitam adalah sebagai berikut:
Garis putih terlihat lebih elegan dan sopan dibandingkan dengan garis hitam.
Pengikut garis berbasis garis putih dapat bekerja bahkan dalam kegelapan total atau lampu ambient yang redup. Desain berbasis cahaya hitam biasanya memerlukan penerangan eksternal untuk menjaga kendaraan tetap beroperasi.
AGV berbasis garis putih bekerja lebih akurat terlepas dari warna ubin, kecuali ubin yang sangat putih atau setara dengan warna garis putih.
Mengubah Kendaraan menjadi Pengikut Garis Hitam
Terlepas dari kelebihan di atas, jika pengguna lebih suka kendaraan mengikuti garis hitam, maka sistem dapat dengan mudah diubah untuk melakukannya melalui beberapa modifikasi cepat dalam desain yang diusulkan.
Pengguna hanya untuk menukar atau menukar koneksi pin input op amp dengan preset, dan menghapus LED yang terkait dengan LDR.
Sepasang: Sirkuit UPS Gelombang Sinus 50 Watt Berikutnya: Penjelasan Sirkuit Elektronik Dasar - Panduan Pemula untuk Elektronik