Motor servo adalah perangkat mekanis mandiri yang digunakan untuk mengontrol mesin dengan presisi tinggi. Ini ditemukan di banyak aplikasi mulai dari mainan hingga otomasi industri. Ada berbagai jenis motor, tetapi motor servo dirancang khusus untuk posisi sudut tertentu untuk mengontrol mesin. Biasanya motor servo digunakan untuk mengontrol gerak sudut antara 0 ° hingga 180 ° dan 0 ° hingga 90 °. Itu prinsip kerja motor servo berdasarkan PWM ( modulasi lebar pulsa ) pulsa.

Motor servo
Antarmuka Motor Servo dengan Mikrokontroler 8051
Motor servo adalah salah satu motor yang paling umum digunakan untuk gerakan sudut yang tepat. Keuntungan menggunakan motor servo adalah posisi sudut motor dapat dikontrol tanpa mekanisme umpan balik. Motor servo biasanya digunakan di aplikasi komersial dan industri . Mereka juga banyak digunakan seperti pada sistem penggerak seperti robot, pesawat terbang dll.

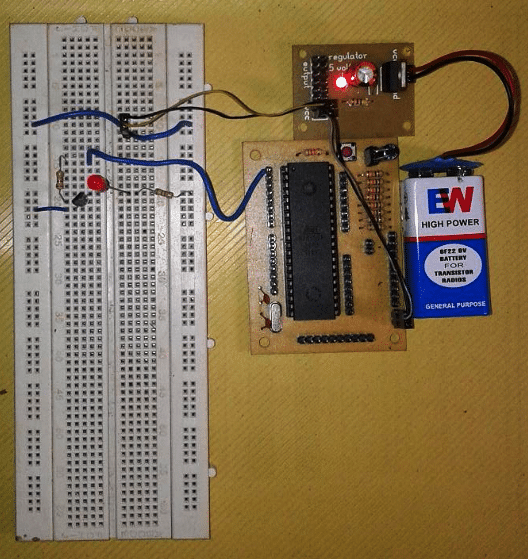
Menghubungkan Motor Servo dengan Mikrokontroler 8051
Prinsip kerja dan pengoperasian motor servo hobi sangat sederhana, terdiri dari tiga kabel dimana dua diantaranya (Hitam dan merah) digunakan untuk memberikan tenaga dan kabel ketiga digunakan untuk memberikan sinyal kendali. Gelombang Pulse Width Modulated (PWM) digunakan sebagai sinyal kontrol dan posisi sudut ditentukan oleh lebar pulsa pada input kontrol. Pada artikel ini, kami menggunakan motor servo yang memiliki sudut putaran 0-180 ° dan posisi sudut dapat dikontrol dengan memvariasikan duty cycle antara 1ms hingga 2ms.
Di sini motor servo berinteraksi 8051 mikrokontroler , kabel hitam terhubung ke pin arde dan motor mendapatkan daya dari kabel merah. Kontrol motor servo terhubung port0 dari 8051 mikrokontroler. Osilator kristal 11,0592MHz digunakan untuk menyediakan jam yang berdenyut ke mikrokontroler dan kapasitor keramik 22pf digunakan untuk menstabilkan operasi kristal. Kapasitor 10KΩ dan 10uf digunakan untuk memberikan daya pada reset ke mikrokontroler.
Mengontrol Motor Servo dengan rotasi Sudut
Prinsip kerja motor servo terutama tergantung pada siklus kerja. Ini menggunakan gelombang Pulse Width Modulated (PWM) sebagai sinyal kontrol. Sudut rotasi ditentukan oleh lebar pulsa dari pin kontrol. Disini motor servo digunakan untuk sudut putaran dari 0 sampai 180 derajat. Kita dapat mengontrol posisi sudut yang tepat dengan memvariasikan denyut nadi antara 1ms hingga 2ms.

Mengontrol Motor Servo dengan Rotasi Sudut
Pemrograman Motor Servo Dengan rotasi sudut
#include
Sbit servomotor_pin = P0 ^ 5
Void delay (unsigned int)
Void servo_delay (unsigned int)
Batalkan main ()
{
Servomotor_pin = 0x00
Melakukan
{
// putar ke 0 °
Servomotor_pin = 0x01
Sevo_delay (50)
Servomotor_pin = 0x00
Penundaan (1000)
// putar ke 90 derajat
Servomotor_pin = 0x01
Sevo_delay (82)
Servomotor_pin = 0x00
Penundaan (1000)
// putar ke 180 derajat
Servomotor_pin = 0x01
Sevo_delay (110)
Servomotor_pin = 0x00
Penundaan (1000)
Sementara (1)
}
}
Void delay (unsigned int a)
{
Int p
Untuk (p = 0p
}
Void servo_delay (unsigned int a)
{
Int p
Untuk (p = 0p
}
Prinsip Kerja Motor Servo
Prinsip kerja motor servo terutama bergantung pada 'aturan tangan kiri Fleming'. Pada dasarnya motor servo diadaptasi dengan Motor DC , sensor posisi, reduksi roda gigi, dan sirkuit elektronik. Motor DC mendapatkan tenaga dari baterai dan bekerja pada kecepatan tinggi dan torsi rendah. Kami merakit poros dan roda gigi yang terhubung ke motor DC kemudian kami dapat menambah dan mengurangi kecepatan motor secara bertahap.
Sensor posisi merasakan lokasi poros dari posisi tetapnya dan mengirimkan informasi ke sirkuit kontrol. Sirkuit kontrol menerjemahkan sinyal sesuai dari sensor posisi dan membandingkan lokasi sebenarnya dari motor dengan posisi yang diinginkan dan karenanya mengontrol arah putaran motor DC untuk mendapatkan posisi yang diperlukan. Umumnya motor servo membutuhkan suplai DC 4,8V hingga 6 V.
Motor Servo Mengontrol dengan Perintah Port Serial
Tujuan utama dari proyek ini adalah untuk mengontrol motor servo dengan menggunakan komputer pribadi. Diperlukan satu jalur kontrol dari mikrokontroler dan jalur input serial, dari port serial komputer pribadi untuk mengirim perintah ke sirkuit. Sumber waktu disediakan oleh osilator kristal. Rangkaian motor servo yang dirancang dihubungkan ke komputer dengan bantuan kabel serial dan level shifter kemudian buka perangkat lunak 'Hyper Terminal' di PC untuk memilih comport komputer.

Mengendalikan Motor Servo dengan Perintah Port Serial
Setelah perintah dikirim dari komputer pribadi (PC) ke mikrokontroler melalui hyper terminal dengan level shifter, mikrokontroler memperoleh data ini dan membandingkannya dengan data yang telah ditentukan dan menghasilkan sinyal yang sesuai untuk mengaktifkan driver motor untuk mengendarainya di kecepatan yang diinginkan. Banyak proyek mikrokontroler dikembangkan berdasarkan motor servo seperti robot balancing, landasan pacu helikopter dan sebagainya. Kita dapat menggunakan motor servo untuk tujuan keamanan dengan menghubungkan dengan kamera nirkabel karena kita dapat mengontrol penyimpangan kamera 360.
Robot Penyeimbang Diri
Robot self balancing mampu menyeimbangkan dirinya sendiri dengan bantuan motor servo. Robot ini telah dirakit menggunakan komponen struktural, mekanis dan elektronik yang menghasilkan platform yang tampak tidak seimbang yang sangat mudah terjungkal dalam satu jalur. Roda robot mampu berputar independen dalam dua cara, yang digerakkan oleh motor servo. Informasi tentang sudut perangkat relatif terhadap tanah akan diperoleh dari sensor kemiringan di perangkat.

Robot Penyeimbang Diri
Sensor kemiringan dapat berupa akselerometer, sensor giroskopik, atau Sensor IR (untuk mengukur jarak ke tanah). Sensor mengirimkan informasi ke unit kontrol, yang akan memproses umpan balik menggunakan algoritma proporsional, integral, turunan (PID) dasar untuk menghasilkan sinyal kontrol posisi kompensasi ke motor servo untuk menyeimbangkan perangkat.
Aplikasi Motor Servo
- Ini digunakan di mesin Press untuk memotong potongan sesuai ukuran
- Ini digunakan di stasiun pengisian gula
- Ini digunakan dalam aplikasi Pelabelan
- Ini digunakan sistem Packing dengan fungsi waktu acak
- Ini digunakan Digunakan di pesawat terbang
Keunggulan Servo Motor
- Jika motor mendapat beban berat maka pengemudi akan menambah arus ke kumparan motor sebagai upayanya untuk memutar motor. Terutama, tidak ada kondisi out-of-step.
- Operasi kecepatan tinggi dimungkinkan oleh motor servo.
Ini semua tentang prinsip kerja motor servo dan berinteraksi dengan mikrokontroler 8.051 Selanjutnya, untuk bantuan teknis apa pun terkait artikel ini atau proyek elektronik yang dirancang menggunakan perangkat antarmuka seperti RTC, OLED, memori flash, LCD khusus, tampilan layar sentuh, dan lain-lain. Anda dapat mendekati kami dengan memberikan komentar Anda di bagian komentar di bawah.