Postingan tersebut menjelaskan cara membuat troli kendali jarak jauh yang murah namun kuat yang dapat digerakkan ke kiri, kanan, maju, dan mundur sesuai kebutuhan, oleh pengguna menggunakan handset jarak jauh yang diberikan. Idenya tidak bergantung pada rangkaian mikrokontroler.
Dalam salah satu posting saya sebelumnya, saya membahas tentang a sirkuit mobil mainan remote control sederhana , ide troli yang dikendalikan dari jarak jauh saat ini terinspirasi dengan konsep yang sama tetapi dimaksudkan untuk digunakan untuk membawa beban yang berat dan jauh lebih berat.
Troli Kontrol Jarak Jauh untuk Outlet Ritel
Desain ini mungkin secara khusus cocok dan berlaku untuk mal atau gerai ritel perbelanjaan di mana dapat diimplementasikan sebagai kendaraan pengangkut kecil untuk mengangkut material di dalam kompleks atau tempat dengan bantuan beberapa penekanan pada unit Tx jarak jauh.
Langkah pertama dalam membangun troli kendali jarak jauh yang diusulkan adalah mendapatkan satu set modul RF Rx / Tx standar baik dari dealer elektronik lokal Anda atau dari toko online mana pun, saya sarankan membeli dari toko online karena akan jauh lebih mudah dan nyaman , meski lebih mahal.
Unit pengadaan akan terlihat seperti yang ditunjukkan di bawah ini:
Menggunakan Modul 433MHz Tx, Rx

Unit warna coklat sisi kiri adalah Tx atau unit pemancar sedangkan luas sirkuit yang berdampingan adalah Rx atau unit penerima.
Unit Tx dapat dilihat dengan 4 tombol berwarna merah bertanda A, B, C, D, dan papan Rx dapat dilihat memiliki 4 relai (kotak warna hitam).
Empat tombol masing-masing dari modul Tx digabungkan secara nirkabel untuk mengoperasikan empat relai yang sesuai dari modul Rx.
Anda dapat melihat konektor terpasang di sekitar tepi papan (berwarna hijau), konektor ini diakhiri dengan tepat dengan input suplai (+) (-) untuk papan Rx dan juga dengan kontak relai, untuk semua 4 relai.
Relai, seperti yang kita ketahui terdiri dari 5 kontak dasar dan pinoutnya yaitu: 2 pin untuk koil, satu untuk tiang dan masing-masing untuk N / C dan N / O.
Karena ada 4 relai dalam unit Rx, Anda akan dapat menemukan 5 x 4 = 20 keluaran yang terkait dengan titik konektor yang relevan.
Ini bisa menjadi tugas yang membosankan untuk melacak secara terpisah pemutusan relai ini pada konektor, jadi saya sarankan menyolder kabel langsung pada pinout relai untuk menyelamatkan diri Anda dari tugas di atas, upaya ini akan diperlukan nanti saat kami mengaktifkan unit dengan sirkuit kontrol troli.
Membangun sirkuit kontrol relai untuk troli
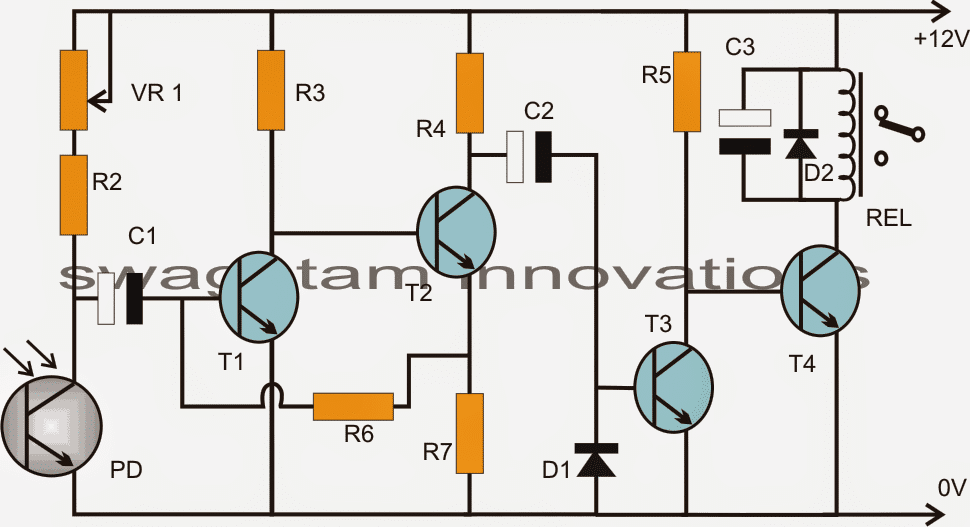
Untuk ini, Anda akan membutuhkan beberapa relai dan dioda. Relai harus diberi nilai yang benar untuk menangani motor roda berdaya tinggi pada troli. Saya merekomendasikan menggunakan OEN membuat relai untuk ini, seperti yang ditunjukkan pada gambar berikut:

Dioda yang akan dibutuhkan dalam rangkaian driver relai dapat menjadi dioda 1N4007 standar kami.
Detail rangkaian untuk hal yang sama dapat disaksikan pada diagram berikut:
Detail dan Skema Kabel Relay


Bagaimana Sirkuit Troli Jarak Jauh Bekerja
Dengan menggunakan relai yang ditentukan di atas dan dioda, Anda harus menyelesaikan pembuatan papan sirkuit driver relai di atas yang dapat dilakukan dengan mudah pada selembar veroboard.
Setelah ini kami memiliki tugas utama yang kami miliki yaitu mengintegrasikan kabel hijau yang ditunjukkan pada diagram di atas dengan papan Rx remote control.
Sebelum integrasi kita harus memasukkan beberapa mod ke dalam modul Rx, seperti yang dijelaskan di bawah ini:
Menggunakan potongan-potongan kabel berinsulasi, yang benar-benar dilucuti dan diberi timah di ujungnya, lanjutkan menghubungkan (dengan menyolder) semua pin tiang relai dan hubungkan sambungan umum ini dengan garis positif papan Rx.
Sekarang dalam situasi ini kita dapat mengasumsikan bahwa ketika relai tidak dalam keadaan aktif (melalui handset jarak jauh), input positif kutub dari setiap relai akan dihubungkan ke titik N / C masing-masing, dan ketika diaktifkan, positif dari kutub akan bergeser dan terhubung dengan titik N / O yang relevan.
Singkatnya, pada aktivasi kontak N / O akan menerima suplai positif dan oleh karena itu kami tertarik pada suplai positif ini dari kontak N / O karena ini akan dimulai hanya ketika relai diaktifkan, yang berarti bahwa ketika Tx (pemancar ) ditekan.
Oleh karena itu semua pinout N / O yang relevan harus disambungkan ke kabel hijau dari rangkaian driver relai yang ditunjukkan di atas.
Setelah ini selesai, Rx akan diintegrasikan dengan modul driver relai untuk menjalankan semua manuver yang dimaksudkan dari troli yang dikendalikan dari jarak jauh, yaitu: maju, mundur, gerakan, dan kiri, belokan kanan.
Memberi Daya Papan Driver relai
Karena relai pada tahap driver relai akan bertanggung jawab untuk menggerakkan motor berat yang terhubung dengan roda troli, suplai untuk ini harus sama kuatnya, oleh karena itu baterai asam timbal siklus dalam menjadi ideal untuk aplikasi ini.
Dengan asumsi motor diberi nilai pada 12V, baterai asam timbal 40AH akan cukup baik untuk memungkinkan troli bergerak bahkan dengan beban yang lebih berat.
Mengkonfigurasi Roda dengan Motor untuk Manuver yang Dimaksud
Seperti yang dapat diidentifikasi pada gambar berikut, troli kendali jarak jauh yang dibahas akan membutuhkan 4 roda untuk menopang dan menggulung sistem.
Namun hanya dua roda depan yang akan bertanggung jawab untuk memungkinkan manuver mundur, maju, kanan dan kiri yang dimaksudkan, dan oleh karena itu motor harus dijepit dengan dua roda depan troli ini, seperti yang ditunjukkan pada gambar berikut:

Mengonfigurasi Sambungan Roda Troli
Roda belakang hanyalah roda tiruan, dipasang hanya untuk memungkinkan troli berputar bebas, sebagai respons terhadap perintah roda depan.
Seperti yang dapat diamati pada gambar di atas, modul yang ditandai sebagai rakitan PCB adalah papan driver relai, modul jarak jauh menandakan papan penerima jarak jauh Rx sedangkan baterai adalah baterai 40 AH 12V yang telah kita bahas di bagian artikel sebelumnya.
Setelah merakit Anda mungkin harus men-tweak dan memeriksa koneksi kabel motor dengan papan driver relai.
Untuk gerak maju dan mundur kedua motor harus sinkron satu sama lain, sedangkan untuk melakukan gerak balik ke kanan atau ke kiri, motor harus melalui gerak rotasi yang berlawanan.
Jika Anda menemukan motor tidak berperilaku dengan cara di atas, kemungkinan besar dapat diperbaiki hanya dengan menukar polaritas salah satu motor. Ini akan segera memperbaiki situasi dan memaksa motor untuk melaksanakan manuver yang ditentukan.
Terakhir, tombol A. B, C, D dapat dicocokkan atau dipertukarkan dengan tepat untuk setiap manuver masing-masing dengan mengutak-atik tautan kabel hijau dengan modul Rx, sesuai preferensi pribadi pengguna.
Sepasang: Cara Memodifikasi SMP untuk Output Arus dan Tegangan yang Dapat Disesuaikan Berikutnya: Sensor Gelombang Mikro atau Rangkaian Sensor Doppler