Robot pick and place adalah robot yang digunakan untuk mengambil suatu objek dan menempatkannya di lokasi yang diinginkan. Ini bisa berupa robot silinder yang memberikan gerakan dalam sumbu horizontal, vertikal dan rotasi, robot bola menyediakan dua gerakan rotasi dan satu linier, robot artikulasi atau robot scara (robot tetap dengan lengan putar 3 sumbu vertikal).
Keuntungan
Sebelum melangkah lebih jauh, mari kita lihat beberapa alasan mengapa memilih dan menempatkan robot lebih disukai:
- Mereka lebih cepat dan dapat menyelesaikan pekerjaan dalam hitungan detik dibandingkan dengan rekan manusia mereka.
- Mereka fleksibel dan memiliki desain yang sesuai.
- Mereka akurat.
- Mereka meningkatkan keamanan lingkungan kerja dan sebenarnya tidak pernah lelah.
Bagian dari Robot Pick N Place

Pilih N Place Robot
Mari kita lihat terdiri dari apa sebenarnya robot pick and place:
- Untuk Rover : Merupakan badan utama robot yang terdiri dari beberapa benda kaku seperti silinder atau bola, sambungan dan sambungan. Ia juga dikenal sebagai manipulator.
- Akhiri Effector : Ini adalah badan yang terhubung ke sambungan terakhir penjelajah yang digunakan untuk tujuan menggenggam atau menangani benda. Ini bisa menjadi analogi dengan lengan manusia.
- Aktuator : Mereka adalah pengemudi robot. Ini benar-benar menggerakkan robot. Ini bisa berupa motor apa saja seperti motor servo, motor stepper atau silinder pneumatik atau hidrolik.
- Sensor: Mereka digunakan untuk merasakan keadaan internal serta eksternal untuk memastikan robot berfungsi dengan lancar secara keseluruhan. Sensor melibatkan sensor sentuh, sensor IR, dll.
- Kontroler : Digunakan untuk mengontrol aktuator berdasarkan umpan balik sensor dan dengan demikian mengontrol gerakan masing-masing dan setiap sendi dan akhirnya pergerakan efektor akhir.
Cara Kerja Robot Pick N Place Dasar:
Fungsi dasar a memilih dan menempatkan robot dilakukan dengan persendiannya. Sendi dianalogikan dengan sendi manusia dan digunakan untuk bergabung dengan dua benda kaku yang berurutan di dalam robot. Mereka bisa berupa sambungan putar atau sambungan linier. Untuk menambahkan sambungan ke setiap link robot, kita perlu mengetahui derajat kebebasan dan derajat pergerakan bagian tubuh tersebut. Derajat kebebasan menerapkan gerakan linier dan rotasi tubuh dan Derajat gerakan menyiratkan jumlah sumbu yang dapat bergerak tubuh.

Robot Pick N Place Sederhana
Robot pick and place sederhana terdiri dari dua benda kaku di atas dasar yang bergerak, dihubungkan bersama dengan sambungan putar. Rotary joint (Sendi putar) adalah yang memberikan rotasi 360 derajat di sekitar salah satu sumbu.
- Bagian bawah atau alas dipasang dengan roda yang memberikan gerakan linier.
- 1strigid body dipasang dan menopang rigid body kedua yang menyediakan end efektor.
- 2ndrigid body dilengkapi dengan gerakan di semua 3 sumbu dan memiliki 3 derajat kebebasan. Itu terhubung ke 1sttubuh dengan sendi rotasi.
- Efektor akhir harus mengakomodasi semua 6 derajat kebebasan, untuk menjangkau semua sisi komponen, untuk mengambil posisi ke ketinggian berapa pun.
Secara keseluruhan, robot pick and place dasar bekerja sebagai berikut:
- Roda di bawah pangkalan membantu menggerakkan robot ke lokasi yang diinginkan.
- Benda kaku yang menopang efektor ujung menekuk atau meluruskan untuk mencapai posisi tempat benda ditempatkan.
- Efektor akhir mengambil objek dengan pegangan yang kuat dan menempatkannya pada posisi yang diinginkan.
Sekarang kita telah mendapat gambaran singkat tentang robot pick and place, pertanyaan dasarnya adalah bagaimana sebenarnya robot itu dikendalikan.
Robot pick and place sederhana dapat dikontrol dengan mengontrol pergerakan efektor ujungnya. Gerakan tersebut dapat menggunakan gerakan hidrolik, yaitu menggunakan fluida hidrolik di bawah tekanan untuk menggerakkan robot, atau menggunakan gerakan pneumatik, yaitu menggunakan udara bertekanan untuk menyebabkan gerakan mekanis. Namun cara yang paling efektif adalah dengan menggunakan motor untuk memberikan gerakan yang dibutuhkan. Motor harus dikontrol untuk memberikan gerakan yang dibutuhkan pada robot dan efektor akhir.
Contoh Kerja Mengontrol Robot Pick N Place
Bagaimana dengan mengendalikan robot hanya dengan beberapa tombol di keypad? Ya, itu mungkin! Hanya dengan menekan tombol yang diperlukan, kita dapat mengirimkan perintah ke robot untuk membuatnya bergerak ke segala arah untuk mencapai tugas kita. Selain itu, ini dapat dicapai dengan menggunakan komunikasi nirkabel sederhana.
Mari kita lihat bagaimana sebenarnya ini bekerja:
Bagian pemancar terdiri dari papan tombol yang dihubungkan ke mikrokontroler. Setiap nomor tombol dalam format desimal diubah menjadi biner 4 digit oleh mikrokontroler dan keluaran paralel di salah satu portnya diterapkan ke pembuat enkode. Encoder mengubah data paralel ini menjadi data serial dan ini diumpankan ke pemancar, dilengkapi dengan antena untuk mengirimkan data serial.

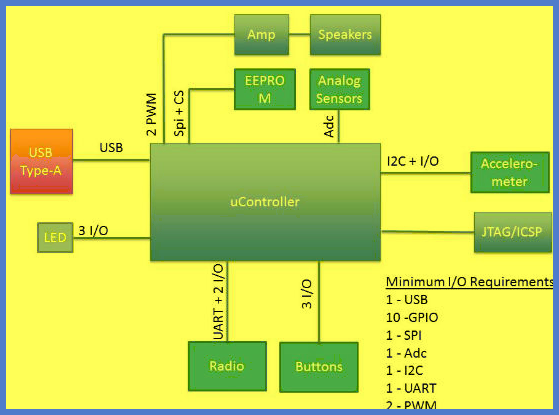
Diagram Blok Menampilkan Transmitter dari Robot Pick N Place
Sisi penerima terdiri dari dekoder yang dihubungkan ke mikrokontroler. Dekoder mengubah perintah yang diterima dalam format serial ke bentuk paralel dan memberikan data ini ke mikrokontroler. Berdasarkan perintah ini mikrokontroler mengirimkan sinyal input yang sesuai ke driver motor untuk menggerakkan motor masing-masing.

Diagram Blok Menampilkan Penerima Robot Pick N Place
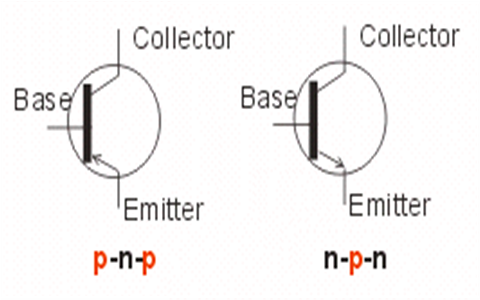
Sistem ini terdiri dari dua motor untuk memberikan gerakan ke seluruh robot dan dua motor lainnya untuk memberikan gerakan lengan. End effector atau gripper perlu dikontrol untuk memberikan tekanan yang tepat pada objek untuk menanganinya secara efektif, untuk memberikannya pegangan lembut . Ini dipastikan dengan mengendalikan motor lengan melalui perintah yang tepat. Output dari motor lengan dihubungkan ke resistor 10Ohms / 2W dan pada saat motor kelebihan beban atau kondisi terkunci, tegangan tinggi dikembangkan melintasi resistor, yang menyebabkan logika level tinggi pada output optoisolator dan interupsi. pin dari mikrokontroler yang terhubung ke output optoisolator melalui transistor pnp mendapat sinyal logika rendah, yang menghentikan semua operasi gripper lainnya.
Dengan demikian melalui komunikasi RF sederhana, kita sebenarnya dapat mengontrol robot pick and place.
Aplikasi Praktis Pick and Place Robot:
- Aplikasi Pertahanan : Dapat digunakan untuk pengawasan dan juga untuk mengambil objek berbahaya seperti bom dan menyebarkannya dengan aman.
- Aplikasi Industri : Robot ini digunakan dalam produksi, untuk mengambil suku cadang yang diperlukan dan menempatkannya pada posisi yang benar untuk menyelesaikan perlengkapan mesin. Ini juga dapat digunakan untuk menempatkan benda di sabuk konveyor serta mengambil produk yang rusak dari sabuk konveyor.
- Aplikasi Medis : Robot ini dapat digunakan dalam berbagai operasi bedah seperti operasi penggantian sendi, bedah ortopedi, dan bedah internal. Ia melakukan operasi dengan lebih presisi dan akurat.
Selain aplikasi tersebut, robot ini juga dapat digunakan di berbagai aplikasi lain yang sesuai untuk umat manusia.
Sekarang pertanyaannya tetap- Seberapa jauh hari ketika robot akan benar-benar memudahkan jalan bagi manusia?