Di bagian artikel ini kita mempelajari tentang metode inovatif untuk mengubah mekanisme pedal tekan pada kendaraan listrik menjadi sinyal listrik yang bervariasi, yang selanjutnya dapat digunakan untuk memproses kontrol kecepatan kendaraan.
Konsep yang dijelaskan akan bekerja seperti akselerator elektronik, yang akan meningkatkan kecepatan kendaraan secara linier saat pedal diinjak secara bertahap, begitu pula sebaliknya dengan menggunakan teknologi PWM.
Ide itu diminta oleh Tuan Lokesh Maini
Spesifikasi teknis
Saya seorang mekanik, sedang mengerjakan kendaraan listrik dan saya ingin mengontrol kecepatan motor saya dengan menggunakan pedal. saya tidak mendapatkan pengontrol untuk motor saya tolong bantu saya untuk membangun sendiri saya akan sangat
berterimakasih
Spesifikasi Motor adalah 36volt, 43amps dan 1.5hp brushed motor dc.
Desain Mekanis
Versi elektronik dari akselerator pedal terutama akan memerlukan mekanisme untuk pertama-tama mengubah tekanan mekanis pedal menjadi sinyal listrik yang bervariasi, sehingga sinyal ini dapat diproses melalui tahap prosesor sinyal untuk konversi yang diinginkan menjadi kontrol kecepatan praktis dari pedal gas. kendaraan.
Banyak konsep dapat dicoba seperti dengan menggunakan sensor beban piezo, sensor beban kapasitif, dengan sensor resonansi dll. Dalam artikel ini kita akan mempelajari metode yang jauh lebih sederhana yang saya buat yang menggabungkan rakitan LED / LDR untuk mencapai hal yang sama. .

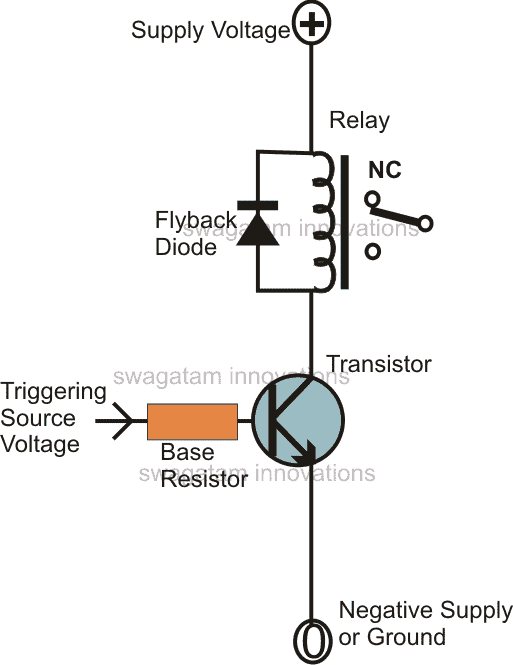
Pada susunan elektromekanis yang ditunjukkan pada gambar di atas kita dapat melihat komponen terintegrasi berikut ini:
Roda gigi kecil dipasang dengan mekanisme sekrup.
Kepala sekrup memiliki permukaan reflektor alas putih
Unit LED / LDR diposisikan di depan kepala sekrup.
Bagaimana mekanisme Usulan bekerja.
Roda gigi yang ditunjukkan pada gambar di atas harus dikunci dengan roda gigi lain yang perbandingannya mungkin 10 kali lebih tinggi dari roda gigi ini.
Gigi yang lebih besar perlu dikonfigurasikan dengan mekanisme pedal sedemikian rupa sehingga memulai gerakan rotasi sebagai respons terhadap penekanan pedal.
Respons rotasi dari roda gigi pada gilirannya akan menghasilkan gerakan maju kepala sekrup melintasi ruang tempat perakitan LED / LDR berada.
Proses ini akan menyebabkan jumlah pantulan cahaya dari LED yang diterima oleh LDR bervariasi secara proporsional.
Data yang bervariasi ini (dalam bentuk resistansi yang bervariasi) sesuai dengan tekanan pedal kemudian dapat diumpankan ke sirkuit pemroses sinyal untuk memaksakan kontrol kecepatan yang diinginkan dari kendaraan tertentu.
Dalam posting berikutnya kita akan mempelajari tahap pemroses sinyal menggunakan teknik PWM.
Dalam bagian atas kami belajar tentang rakitan konverter elektromekanis sederhana untuk mengubah aksi pedal menjadi sinyal listrik yang bervariasi secara proporsional.
Mengubah Tindakan Pedal ke PWM
Sekarang mari kita pelajari implementasi rangkaian yang akan memungkinkan kita untuk mengubah sinyal listrik pedal menjadi sinyal PWM yang bervariasi sesuai untuk kontrol kecepatan motor kendaraan yang dimaksud.

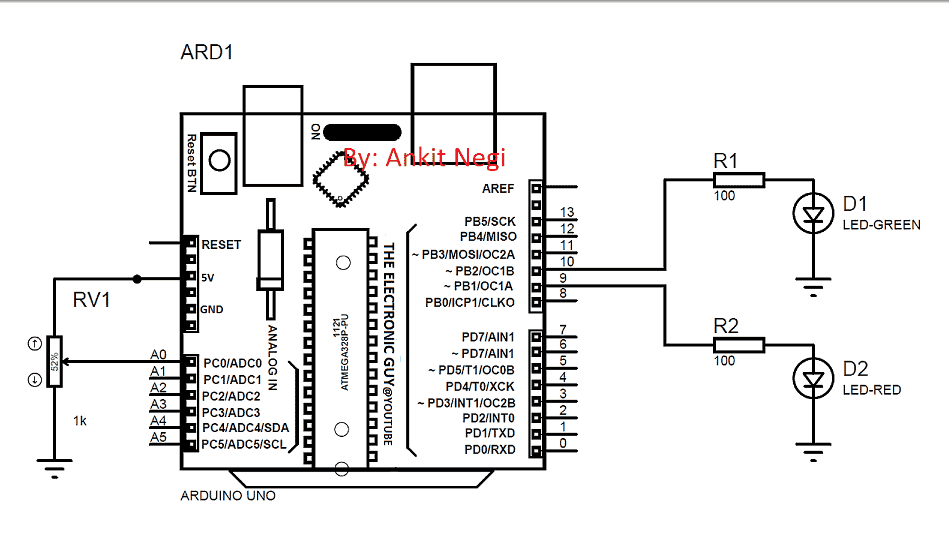
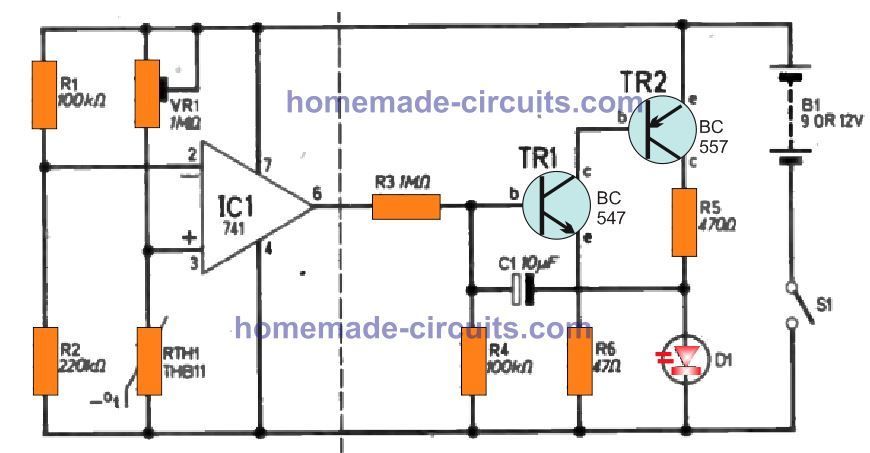
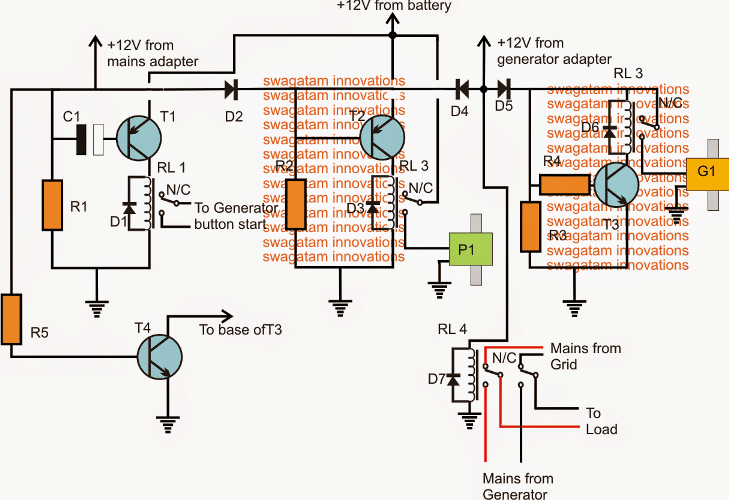
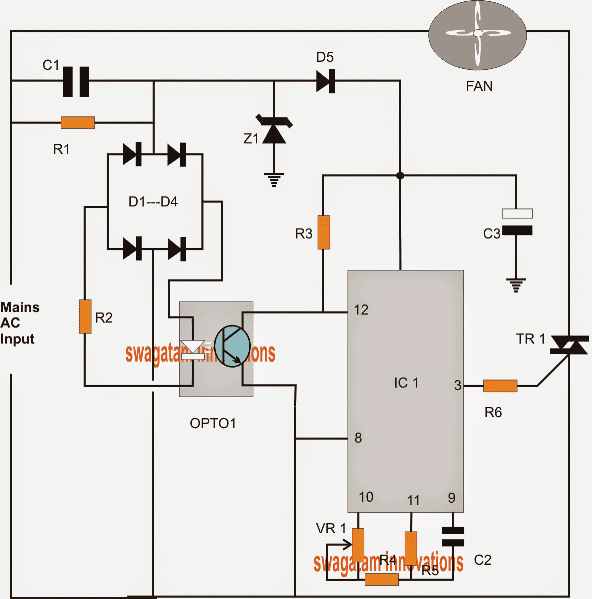
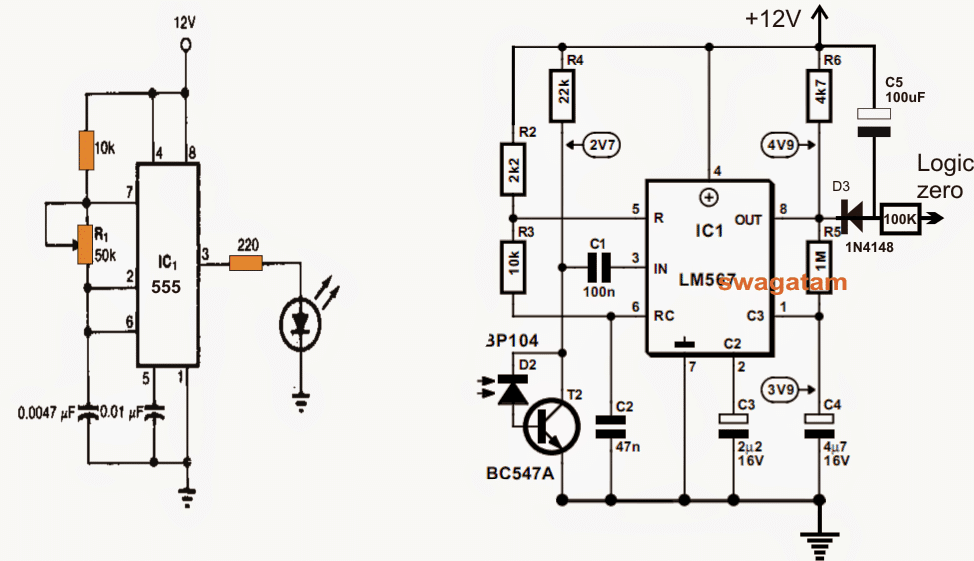
Mengacu pada diagram rangkaian di atas, kita dapat menilai operasi rangkaian dengan bantuan poin-poin berikut:
IC1 dikonfigurasi sebagai generator pulsa 80Hz yang memiliki waktu ON maksimum dan waktu OFF minimum sebagai siklus tugasnya
IC2 dicurangi sebagai komparator yang pertama kali mengubah pulsa 80Hz di atas yang diterapkan pada pin2 dengan gelombang segitiga yang dihasilkan pada pin6 dan membandingkan gelombang segitiga dengan tegangan modulasi yang tersedia pada pin5.
Tegangan modulasi pin5 berasal dari emitor BJT BC547 yang dikonfigurasi sebagai kolektor umum dengan basisnya terhubung dengan input LDR yang diperoleh dari aksi pedal.
Resistensi yang bervariasi sebagai respons terhadap penekanan pedal dibandingkan dengan pengaturan preset 100K dan besaran tegangan yang proporsional dikembangkan di dasar transistor yang mengubah input arus rendah menjadi sinyal arus tinggi yang setara melalui pin5 IC2.
Tingkat potensial sesaat ini diterima dan diproses oleh IC2 yang menghasilkan besaran proporsional dari sinyal PWM untuk MOSFET dan motor yang terhubung.
Dengan demikian, kecepatan motor dikendalikan dan bervariasi sesuai PWM yang berfluktuasi sebagai respons terhadap tekanan pedal kendaraan.
Prosedur di atas secara efektif mengubah aksi pedal menjadi operasi terkontrol dari motor kendaraan dan kecepatannya.
Cara Mengatur Sirkuit.
Sangat mudah.
- Tekan pedal hingga titik maksimumnya sehingga kepala sekrup mencapai posisi terdekat yang memungkinkan di depan unit LED / LDR.
- Selanjutnya atur preset 100k hingga pin3 dari IC2 mulai menghasilkan PWM dengan lebar maksimal, hal ini dapat dikonfirmasi dengan mengukur tegangan pada pin3 sedekat mungkin dengan tegangan supply rangkaian, yaitu 5V.
- Setelah ini selesai, prosedur pengaturan dapat dianggap selesai.
- Hasilnya sekarang dapat diverifikasi dengan menekan pedal pada level yang berbeda dan memeriksa kecepatan motor yang bervariasi dengan cara yang sama.
Sepasang: Sirkuit ESR Meter Sederhana Berikutnya: Cara Membangun Sirkuit Grow Light