Posting tersebut menjelaskan rangkaian driver motor yang dikendalikan laser garis sederhana, yang bekerja dengan menanggapi garis laser horizontal presisi, yang dihasilkan dari perangkat level laser garis, dan secara otomatis menyesuaikan penyelarasan alat yang terhubung atau pekerjaan bekerja dengan kesempurnaan dan akurasi yang ekstrem.
Apa itu Line Laser
Peralatan laser garis adalah pengganti elektronik presisi tinggi dari pelurus tingkat semangat tua milik tukang kayu.
Perangkat laser garis sebenarnya adalah peralatan pemancar laser canggih yang dapat menghasilkan 360 derajat ° Garis laser horizontal beriluminasi presisi tinggi, untuk memberikan referensi kalibrasi ke semua pekerjaan teknik industri atau konstruksi, sehingga hasil akhir pekerjaan lurus dan sejajar sempurna tanpa sedikit pun kesalahan.
Sirkuit ini diminta oleh salah satu pembaca blog ini, Bapak Rafal.
Diskusi rinci mengenai prosedur kerja motor yang dikendalikan laser garis dapat dipelajari dari paragraf berikut:
Tujuan Desain
Bapak. Rafal: Saya sangat baru dalam hal ini. Saya telah melakukan beberapa penelitian dalam beberapa minggu terakhir dan belum menemukan apa yang saya butuhkan.
Saya akan berterima kasih atas bantuan apa pun. Saya melampirkan foto ide saya. Saya ingin mengontrol dua motor DC 12 V dengan level laser.
Level laser garis akan memberi sinyal pada penerima.

Sinyal ini kemudian harus mengontrol arah motor DC 12 V. Motor memutar batang berulir ke depan dan belakang untuk menyesuaikan ketinggian alat.
Dari apa yang saya temukan, akan ada beberapa fotodioda yang terhubung secara paralel, satu set untuk mendeteksi laser di atas level nol dan yang lainnya di bawah level itu. Tingkat nol hanyalah semacam jeda di antara fotodioda untuk menjaga sistem agar tidak bangun. Sensor laser tanpa tampilan. Saya hanya memberikan foto bergambar.
Saya membutuhkan sirkuit jembatan H, tetapi semua yang saya temukan akan digunakan dengan sistem Arduino. Jika perlu, saya dapat membeli jembatan yang sudah jadi dengan harga yang wajar hingga $ 30
Idealnya ini akan bekerja dengan laser merah dan hijau, tetapi panjang gelombangnya sangat berbeda sehingga saya ragu itu bisa dilakukan dan itu tidak akan bekerja di seluruh spektrum cahaya.
Awalnya, saya ingin menyetel tingkat balok ini yang dipasang ke mesin dengan tombol naik-turun. Saya akan senang jika motor kedua kemudian menyamakan dirinya dengan giroskop saat menyiapkannya, tetapi tanpa Arduino mungkin akan sangat sulit.
Saya merasa apa yang saya coba lakukan sangat sederhana sehingga saya bisa lolos tanpa menggunakan Arduino. Dan saya bersikeras pada analog, karena kondisi sulit di lokasi konstruksi dan menurut saya semakin banyak elektronik, semakin perangkat tidak dapat diandalkan.
Ini hanya akan bekerja di dalam ruangan, dan jarak laser maksimal 10m. Motor yang saya temukan di awal memiliki konsumsi arus yang besar yaitu 200mA max 2,19 A, tetapi juga torsi yang besar.
Daya 18 V DC dari baterai Makita.
Terima kasih sebelumnya atas saran apa pun.
Salam dari Polandia
Rafal
Barang curian : Saya mengalami kebingungan tentang cara kerja poros motor. Sekrup berulir pada kedua motor akan mendorong alat, tetapi tidak dapat menariknya kembali? Bagaimana cara kerjanya?
Apakah mungkin menerapkan hal yang sama dengan satu motor?
Mr. Rafal: Garis tegak lurus yang lebih rendah mungkin berukuran 70 cm, hanya untuk ruangan kecil, mis. toilet sehingga Anda bisa masuk melalui pintu.
Mesin tanpa penggerak, ditarik dengan tangan, hanya garis lurus yang rata. Dalam video tersebut, dua objek kuning di tiang adalah detektor laser yang dipasang dengan kuat ke garis lurus.
Laser berdiri di suatu tempat lebih jauh dan menghasilkan garis horizontal.
Motor akan dipasang ke gerobak dan sekrup berulir untuk meratakan garis lurus dengan detektor laser. Harus ada dua motor untuk meratakan kedua sisinya, tetapi itu adalah bayangan cermin.
Satu-satunya bagian yang umum adalah H-bridge dua saluran seolah-olah saya melakukannya dari modul yang sudah jadi dan mungkin giroskop, tapi itu mimpi :).
Penting bahwa ada tombol untuk putaran motor kiri dan kanan.
Prosedurnya begini. Saya menggantung laser misalnya 2 m di atas tingkat lantai yang ditentukan. Saya mengukur 2 meter dari sinar laser ke tepi bawah garis lurus.
Saya mengatur ketinggian menekan tombol sakelar kanan-kiri sehingga sama dengan 2 meter ke tepi bawah garis lurus. Saya menempatkan detektor pada tiang sehingga sinar laser berada pada level nol antara bagian fotodioda. Dan sisanya akan melakukannya sendiri
Dalam lampiran saya meletakkan gambar operasi detektor.
Rafal
Desain Sirkuit

Melihat gambar di atas, dua tahapan sirkuit yang identik akan diperlukan untuk mendeteksi dan mengoreksi alat yang dikendalikan motor terkait dengan akurasi kelurusan garis laser.
Dua tahap yang identik adalah bayangan cermin satu sama lain seperti yang ditunjukkan di bawah ini:

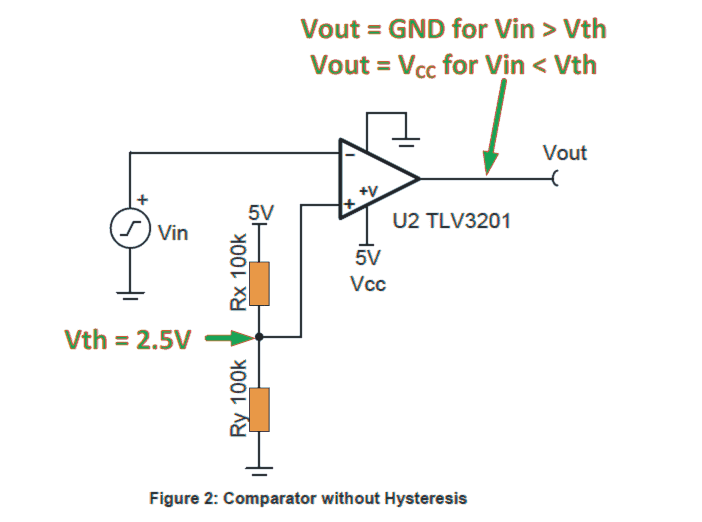
Sirkuitnya cukup mudah. Ini bekerja dengan pembanding jendela yang memastikan bahwa motor penggerak tidak beroperasi selama pasangan LDR diekspos dengan kecerahan garis laser yang sama.
Satu setengah tegangan suplai kemudian dibangkitkan pada input non-pembalik A1 dan ke input pembalik A2.
Segera setelah defleksi pada garis laser terdeteksi (yang dapat terjadi jika alat yang dikendalikan motor tidak lurus), kecerahan yang mempengaruhi LDR R1 dan R2 berubah.
Dalam situasi ini, tegangan input ke komparator jendela menjauh dari setengah tegangan suplai. Situasi ini menyebabkan keluaran komparator memerintahkan jaringan jembatan motor untuk menggerakkan motor searah jarum jam atau berlawanan arah jarum jam.
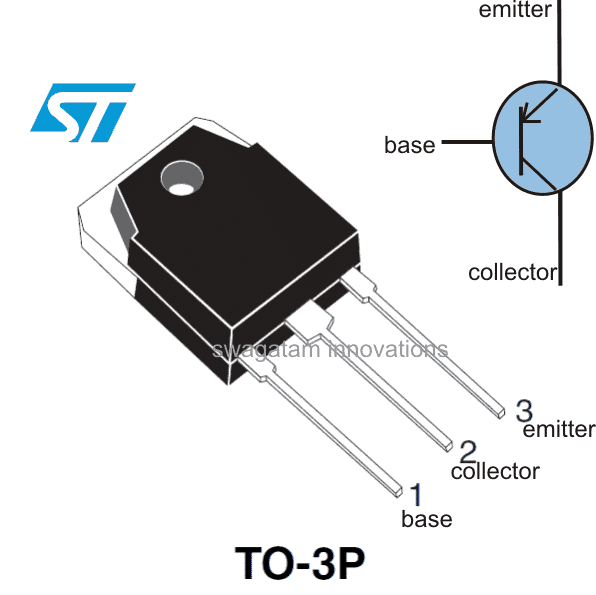
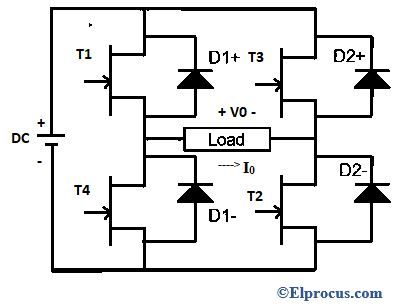
Transistor T1. . . T4 dikonfigurasi seperti jaringan jembatan untuk mengaktifkan peralihan motor masuk arah maju dan mundur tergantung pada iluminasi LDR atau sudut deviasi garis laser.
Dioda D1. . . D4 diposisikan untuk membatalkan puncak tegangan yang dihasilkan selama motor aktif dan berjalan. Fungsi potensiometer Preset P1 dan P2 adalah untuk memfasilitasi penyesuaian penyelarasan.
Ini disetel dengan baik untuk memastikan motor benar-benar mati dan tidak aktif selama pasangan LDR yang relevan terkena kecerahan cahaya laser yang sama persis.
Katakanlah sebagai contoh, karena penyejajaran yang salah dari alat yang dikendalikan motor, kemiringan garis laser menyebabkan cahaya berkurang pada LDR R2 daripada LDR R1. Ini akan mengakibatkan tegangan pada titik A naik di atas setengah tegangan suplai.
Dalam situasi ini, keluaran op amp A1 menjadi tinggi, memaksa transistor T1 dan T4 untuk beroperasi. Ini pada gilirannya menyebabkan motor berputar ke arah yang relevan. Tindakan ini secara otomatis menggeser pahat yang terhubung dalam garis lurus sampai akurasi penyelarasan horizontal sesuai dengan akurasi garis laser.
Sebaliknya, jika kita mengasumsikan alat dimiringkan dengan orientasi berlawanan sehingga iluminasi LDR berlawanan dengan yang dibahas di atas, menyebabkan tegangan pada titik A turun di bawah setengah dari tegangan suplai. Kondisi ini memicu op amp keluaran A2 menjadi high sehingga T3 dan T2 menjadi operasional.
Hal ini mengakibatkan motor sekarang berjalan ke arah yang berlawanan, dalam upaya untuk memperbaiki kesejajaran pahat pada arah yang relevan hingga menjadi lurus sempurna sesuai dengan akurasi garis laser horizontal.
Tombol Atas / Bawah
Tombol naik turun untuk awalnya mengatur ketinggian level spirit dapat dengan mudah diimplementasikan dengan menghubungkan sakelar tombol tekan secara paralel ke masing-masing LDR.
Instalasi LDR
Untuk mendapatkan respons yang benar dari LDR, pasangan kiri kanan harus dipasang di dalam selungkup seperti tabung sehingga mereka hanya dapat 'melihat' iluminasi laser, dan bukan cahaya sekitar lainnya.
Ide tersebut bisa disaksikan pada gambar berikut:

Di sini, kita dapat melihat bahwa LDR diposisikan sangat dekat satu sama lain, yang memastikan bahwa ketika garis laser berada tepat di tengah, beberapa bagian dari kedua pasangan LDR disinari oleh sinar laser secara seragam.
Bagian depan enklosur LDR dapat ditutup dengan lensa yang tersebar, sehingga iluminasi laser dapat menyebar ke dalam di atas LDR masing-masing secara seragam.
Sepasang: Sirkuit Alarm Anti-Pencurian Sederhana untuk Melindungi Barang Berharga Berikutnya: Sirkuit Penguji BJT, JFET, MOSFET Universal


![4 Sirkuit Sakelar Tepuk Sederhana [Teruji]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)