Pengantar singkat tentang robot:
Robot adalah mesin apa pun yang sepenuhnya otomatis, yaitu dimulai dengan sendirinya, memutuskan cara kerjanya sendiri, dan berhenti sendiri. Ini sebenarnya adalah replika manusia, yang dirancang untuk meringankan beban manusia. Ini dapat dikontrol secara pneumatik atau menggunakan cara hidrolik atau menggunakan cara kontrol elektronik sederhana. Robot industri pertama adalah Unimates yang dibuat oleh George Devol dan Joe Engelberger di akhir tahun 50-an dan awal 60-an.
Robot apa pun dibangun di atas 3 hukum dasar yang ditentukan oleh penulis fiksi ilmiah Rusia, Isaac Asimov:
- Robot tidak boleh membahayakan manusia secara langsung atau tidak langsung.
- Robot harus mematuhi perintah manusia kecuali dan sampai melanggar hukum pertama.
- Robot harus melindungi keberadaannya sendiri asalkan dua hukum pertama tidak dilanggar.

Robot Tetap
Robot dapat berupa robot tetap atau robot seluler. Robot Seluler adalah robot dengan basis seluler yang membuat robot bergerak bebas di lingkungan. Salah satu mobile robot canggih tersebut adalah Line Follower Robot. Ini pada dasarnya adalah robot yang mengikuti jalur atau lintasan tertentu dan memutuskan tindakannya sendiri yang berinteraksi dengan rintangan. Jalurnya bisa berupa garis hitam di lantai putih (terlihat) atau medan magnet (tak terlihat). Penerapannya mulai dari penggunaan dasar rumah tangga hingga keperluan industri, dll. Kondisi industri saat ini adalah mereka membawa parsel atau material dari satu tempat ke tempat lain dengan menggunakan sistem crane. Beberapa kali mengangkat beban besar pada saat itu dapat menyebabkan pecahnya material pengangkat dan akan menyebabkan kerusakan pada paket juga. Robot baris berikut biasanya digunakan untuk membawa anak-anak melalui pusat perbelanjaan, rumah, tempat hiburan, industri. Penggunaan baris berikut kendaraan robotik adalah mengangkut bahan dari satu tempat ke tempat lain di industri. Pergerakan robot ini sepenuhnya bergantung pada lintasan. Robot dapat melakukan apa saja yang Anda inginkan. Seperti di pabrik, yang harus mereka lakukan dengan membuat produknya adalah membuat robot.

Robot seluler
Robot pengikut garis
Robot pengikut garis adalah robot yang mengikuti jalur tertentu yang dikendalikan oleh mekanisme umpan balik.
Membangun robot pengikut garis dasar:
Membangun Robot Line Follower dasar melibatkan langkah-langkah berikut.
- Merancang bagian mekanis atau tubuh robot
- Mendefinisikan kinematika robot
- Merancang kendali robot

Robot Line Follower
Bagian mekanik atau tubuh robot dapat didesain menggunakan AutoCAD atau Workspace. Robot pengikut Garis dasar dapat terdiri dari pangkalan di kedua ujungnya yang memasang roda. Lembaran persegi panjang dari plastik keras dapat digunakan sebagai alasnya. Selanjutnya, benda kaku seperti silinder dapat ditambahkan bersama dengan benda berbentuk lainnya yang saling terhubung satu sama lain oleh sambungan, dan masing-masing dengan gerakan yang ditentukan dalam arah tertentu. Robot Line follower dapat menjadi robot bergerak beroda dengan basis tetap, robot bergerak berkaki dengan beberapa benda kaku yang saling berhubungan dengan sambungan.
Langkah selanjutnya melibatkan pendefinisian Kinematika robot. Analisis kinematik robot melibatkan deskripsi gerakannya sehubungan dengan sistem koordinat tetap. Ini terutama berkaitan dengan gerakan robot dan dengan gerakan setiap tubuh dalam kasus robot berkaki. Ini umumnya melibatkan dinamika gerak robot. Seluruh lintasan robot diatur menggunakan analisis Kinematik. Ini dapat dilakukan dengan menggunakan perangkat lunak Workspace.
Kontrol robot adalah aspek terpenting dalam kerjanya. Di sini istilah kendali mengacu pada kendali gerak robot, yaitu mengendalikan pergerakan roda. Robot pengikut garis dasar mengikuti jalur tertentu dan gerakan robot di sepanjang jalur ini dikendalikan dengan mengontrol putaran roda, yang ditempatkan pada poros kedua motor. Jadi, kendali dasar dicapai dengan mengendalikan motor. Sirkuit kontrol melibatkan penggunaan sensor untuk merasakan jalur dan mikrokontroler atau perangkat lain untuk mengontrol operasi motor melalui driver motor, berdasarkan output sensor.
2 Cara mengendalikan Robot Line Follower
- Tanpa menggunakan Mikrokontroler

Diagram Blok dari Sistem kontrol
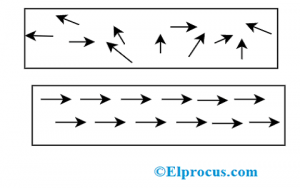
Ini terdiri dari pengaturan IR-LED dan Photodiode untuk setiap motor yang dikendalikan oleh sakelar hidup dan mati transistor.
IR LED saat mendapatkan pembiasan yang tepat akan memancarkan lampu Infra merah. Cahaya IR ini dipantulkan dalam kasus permukaan putih dan cahaya IR yang dipantulkan terjadi pada fotodioda. Hambatan dioda menurun, yang menyebabkan peningkatan arus yang melaluinya dan dengan demikian tegangan turun melewatinya. Fotodioda terhubung ke basis transistor dan sebagai hasil dari peningkatan tegangan di seluruh fotodioda, transistor mulai berjalan dan dengan demikian motor yang terhubung ke kolektor transistor mendapatkan suplai yang cukup untuk mulai berputar. Dalam kasus warna hitam pada jalur yang ditemui oleh salah satu pengaturan sensor, cahaya IR tidak dipantulkan dan fotodioda menawarkan resistansi lebih, menyebabkan transistor menghentikan konduksi dan akhirnya motor berhenti berputar.
Dengan demikian keseluruhan sistem dapat dikontrol menggunakan pengaturan LED-Photodiode-Transistor sederhana.
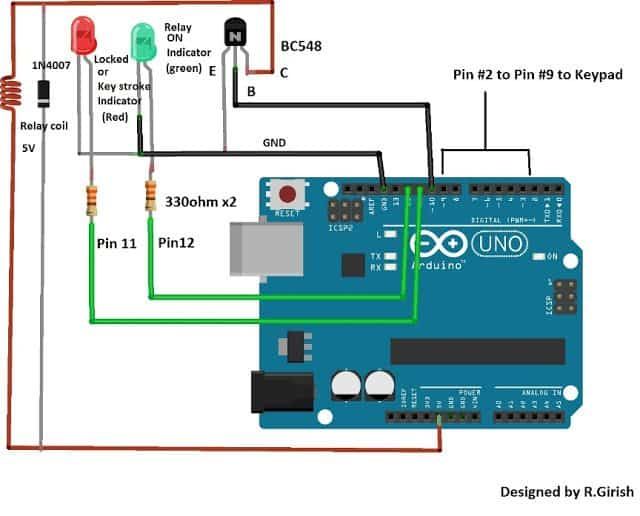
- Dengan menggunakan Mikrokontroler
Prinsip bekerja:
Robot line fallowing adalah salah satu robot yang beroperasi sendiri. Itu mendeteksi dan membiarkan garis yang digambar di area tersebut. Garis tersebut ditandai dengan garis putih pada permukaan balok atau garis balok pada permukaan putih. Sistem ini harus masuk akal. Aplikasi ini tergantung pada sensornya. Di sini kami menggunakan dua sensor untuk tujuan deteksi jalur. Yaitu sensor jarak dan sensor IR. Sensor jarak digunakan untuk deteksi jalur dan sensor IR digunakan untuk deteksi hambatan. Sensor ini dipasang di ujung depan robot. Mikrokontroler adalah perangkat cerdas yang seluruh rangkaiannya dikendalikan oleh mikrokontroler.

Diagram Blok Kendaraan Robot Mengikuti Garis Dengan Mikrokontroler
Berbagai jenis kendaraan robotik yang dikendalikan jalur:
Ada dua jenis kendaraan robotik yang dikendalikan jalur
- Kendaraan robotik yang dikendalikan jalur berbasis seluler
- Kendaraan robotik yang dikendalikan jalur berbasis RF
Aplikasi robot pengikut garis:
- Aplikasi Industri : Robot ini dapat digunakan sebagai pembawa peralatan otomatis di industri yang menggantikan ban berjalan tradisional.
- Aplikasi mobil : Robot ini juga dapat digunakan sebagai mobil matic berjalan di jalan dengan magnet tertanam.
- Aplikasi domestik : Ini juga dapat digunakan di rumah untuk keperluan rumah tangga seperti membersihkan lantai dll.
- Aplikasi panduan : Ini dapat digunakan di tempat umum seperti pusat perbelanjaan, museum, dll untuk memberikan panduan jalur.
Keuntungan:
- Gerakan robot otomatis
- Ini digunakan untuk aplikasi jarak jauh
- Kesederhanaan dalam membangun
- Sistem pas dan lupakan
- Digunakan di rumah, otomasi industri, dll.