

Otomasi dan Kontrol Industri
Sekarang sistem otomasi industri telah menjadi populer di banyak industri dan memainkan peran penting dalam mengendalikan beberapa operasi terkait proses. Karena penerapan berbagai jaringan industri dengan distribusi geografisnya melalui pabrik atau industri, kemampuan transfer dan pengendalian data lantai menjadi lebih canggih dan mudah mulai dari kontrol tingkat rendah hingga tingkat tinggi. Jaringan industri ini dirutekan melalui berbagai bus lapangan yang menggunakan berbagai standar komunikasi seperti protokol CAN, Profibus, Modbus, Jaringan perangkat, dll. Jadi mari kita lihat bagaimana komunikasi CAN bekerja untuk mengotomatiskan industri dan lainnya. sistem berbasis otomasi .
Pengantar Otomasi dan Kontrol Industri
Gambar di bawah ini menunjukkan arsitektur otomasi dan kontrol industri di mana tiga tingkat kontrol dilakukan untuk mengotomatiskan seluruh sistem. Ketiga level ini adalah kontrol dan otomatisasi, kontrol proses, dan kontrol tingkat tinggi. Level Kontrol dan Otomasi terdiri dari berbagai perangkat lapangan seperti sensor dan aktuator untuk memantau dan mengontrol variabel proses.

Arsitektur Otomasi Industri
Process Control Level adalah pengontrol pusat yang bertanggung jawab untuk mengontrol dan memelihara beberapa perangkat pengendali seperti Pengontrol Logika yang Dapat Diprogram (PLC) , dan juga Antarmuka Grafis Pengguna seperti SCADA dan Antarmuka Mesin Manusia (HMI) juga termasuk dalam level ini. Tingkat Kontrol Pesanan Lebih Tinggi adalah tingkat perusahaan yang mengelola semua operasi terkait bisnis.
Dengan mengamati diagram di atas dan setiap level dan juga di antara level, bus komunikasi seperti Profibus dan Ethernet industri dipandang terhubung untuk bertukar informasi. Oleh karena itu, bus komunikasi adalah komponen utama dalam otomasi industri untuk transfer data yang andal di antara pengontrol, komputer, dan juga dari perangkat lapangan.
Control Area Network atau CAN Protocol

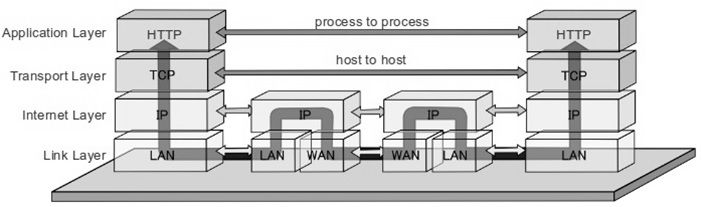
Model Open System Interconnection (OSI)
Komunikasi data adalah transfer data dari satu titik ke titik lainnya. Untuk mendukung komunikasi industri, Organisasi Internasional untuk Standardisasi telah mengembangkan model Open System Interconnection (OSI) untuk menyediakan transfer data antar berbagai node. Protokol dan kerangka kerja OSI ini bergantung pada pabrikan. Protokol CAN menggunakan dua lapisan yang lebih rendah yaitu, lapisan tautan fisik dan data dari tujuh lapisan model OSI.
Jaringan Area Pengontrol, atau protokol CAN adalah multi-master bus komunikasi serial , dan ini adalah jaringan pengontrol independen. Versi CAN saat ini telah digunakan sejak 1990, dan dikembangkan oleh Bosch dan Intel. Ini menyiarkan pesan ke node yang disajikan dalam jaringan dengan menawarkan kecepatan transmisi yang berkisar hingga 1 Mbps. Untuk transmisi yang efektif, ia mengikuti metode deteksi kesalahan yang andal - dan, untuk arbitrase pada prioritas pesan dan deteksi tabrakan, ia menggunakan protokol akses ganda carrier sense. Karena karakteristik transfer data yang andal ini, protokol ini telah digunakan di bus, mobil, dan sistem mobil lainnya, otomasi pabrik dan industri, aplikasi pertambangan, dll.
Transmisi Data CAN
Protokol CAN bukan protokol berbasis alamat, tetapi protokol berorientasi pesan, di mana pesan yang disematkan di CAN memiliki konten dan prioritas data yang sedang ditransfer. Sampai pada penerimaan data di bus, setiap node memutuskan apakah akan membuang atau memproses data - dan kemudian tergantung pada sistem, pesan jaringan ditujukan ke satu node atau banyak node lainnya. Komunikasi CAN memungkinkan node tertentu untuk meminta informasi dari node lain dengan mengirimkan RTR (Remote Transmit Request).

CAN Protokol Transmisi Data
Ini menawarkan transmisi data bebas arbitrase otomatis dengan mentransfer pesan dengan prioritas tertinggi dan mendukung serta menunggu pesan dengan prioritas lebih rendah. Dalam protokol ini, yang dominan adalah logika 0, dan resesif adalah logika 1. Ketika satu node mentransmisikan bit resesif dan yang lain mengirimkan bit dominan, maka bit dominan menang. Skema arbitrase berbasis prioritas memutuskan apakah izin akan diberikan untuk melanjutkan transmisi jika dua atau lebih perangkat mulai melakukan transmisi pada waktu yang sama.
Bingkai Pesan CAN
Jaringan komunikasi CAN dapat dikonfigurasi untuk bingkai atau format pesan yang berbeda.
- Format Bingkai Standar atau Dasar atau CAN 2.0 A
- Extended Frame Format atau CAN 2.0 B

Format Bingkai Standar atau Dasar atau CAN 2.0 A
Perbedaan antara kedua format ini adalah panjang bit, yaitu bingkai dasar mendukung panjang 11-bit untuk pengenal, sedangkan bingkai yang diperpanjang mendukung panjang 29-bit untuk pengenal, yang terdiri dari ekstensi 18-bit dan pengenal 11-bit. Bit IDE berbeda dengan format bingkai CAN yang diperluas dan format bingkai dasar CAN di mana IDE ditransmisikan sebagai dominan dalam kotak bingkai 11-bit dan resesif dalam kotak bingkai 29-bit. Juga dimungkinkan untuk mengirim atau menerima pesan dalam format bingkai dasar oleh beberapa pengontrol CAN yang mendukung format bingkai diperpanjang.

Extended Frame Format atau CAN 2.0 B
Protokol CAN memiliki empat jenis bingkai: bingkai data, bingkai jarak jauh, bingkai kesalahan dan bingkai kelebihan beban. Bingkai data berisi data node transmisi, permintaan bingkai jarak jauh pengenal khusus, bingkai kesalahan transmisi mendeteksi kesalahan node apa pun dan, bingkai kelebihan beban aktif ketika sistem memasukkan penundaan antara data atau bingkai jarak jauh. Komunikasi CAN dapat menghubungkan hingga 2032 perangkat pada satu jaringan secara teoritis, tetapi secara praktis terbatas pada 110 node karena transceiver perangkat keras. Ini mendukung kabel hingga 250 meter dengan baud rate 250 Kbps dengan bit rate 10 Kbps adalah panjang maksimum 1 km, dan terpendek dengan 1 Mbps menjadi 40 meter.
Otomasi dan Kontrol Industri menggunakan CAN Protocol
Ini proyek dilaksanakan untuk mengendalikan industri beban yang dijalankan oleh motor DC berdasarkan variasi temperatur proses. Berbagai sistem kontrol proses tergantung pada suhu. Misalkan, dalam kasus tangki pengaduk - setelah mencapai suhu tertentu - motor DC harus dihidupkan untuk memutar pengaduk. Jadi proyek ini mencapai ini dengan penggunaan protokol CAN yang merupakan komunikasi biaya rendah yang sangat efisien dan andal.
Dua mikrokontroler digunakan dalam proyek ini, satu untuk memperoleh data suhu dan yang lainnya untuk mengendalikan motor DC . CAN Controller MCP2515 dan CAN transceiver MCP2551 terhubung ke kedua mikrokontroler untuk mengimplementasikan komunikasi CAN untuk bertukar data.

Otomasi dan Kontrol Industri menggunakan CAN Protocol
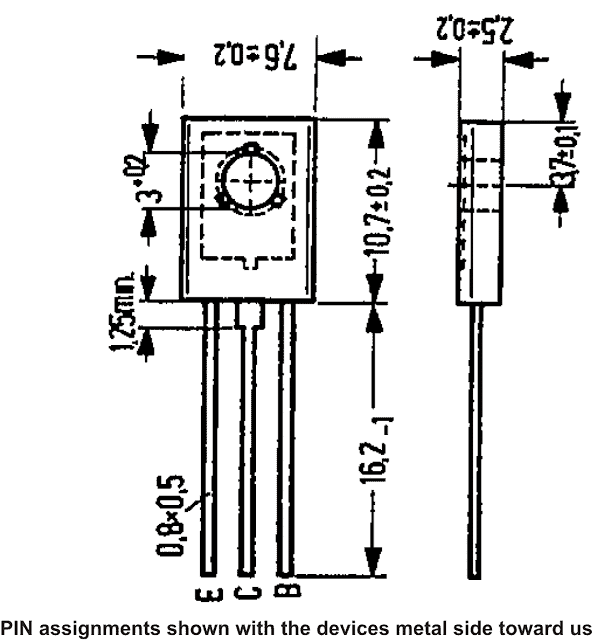
Mikrokontroler sisi pemancar terus menerus memonitor suhu dengan menggunakan LM35 sensor temperatur dengan mengubah nilai analog menjadi digital dengan ADC terpasang padanya. Nilai-nilai ini dibandingkan dengan nilai set yang diprogram dalam mikrokontroler, dan nilai-nilai ini dilanggar ketika mikrokontroler mengirim atau mengirimkan data ke penerima mikrokontroler samping oleh pengontrol CAN dan unit transceiver.
Komunikasi CAN sisi penerima menerima data dan mentransfernya ke mikrokontroler yang selanjutnya memproses data dan mengontrol motor DC oleh IC driver motor. Dimungkinkan juga untuk mengubah arah motor dengan IC driver yang dikendalikan oleh mikrokontroler.
Dengan demikian protokol CAN memungkinkan komunikasi peer-to-peer dengan menghubungkan node yang berbeda di lingkungan industri. Jenis komunikasi ini juga dapat diterapkan di tempat lain sistem otomasi seperti rumah atau gedung , pabrik, dll. Kami berharap artikel ini dapat memberi Anda pemahaman yang lebih baik tentang otomasi industri dengan komunikasi CAN. Silakan menulis kepada kami untuk informasi dan pertanyaan lebih lanjut.
Kredit Foto:




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}