Dalam posting ini kita mempelajari rangkaian timer maju mundur untuk mengoperasikan mekanisme motor inkubator dengan serangkaian gerakan yang disukai. Ide tersebut diminta oleh Pak Anwar
Spesifikasi teknis
Saya dari Indonesia ..... Saya Membutuhkan Skema Timer Inkubator dengan Motor Torsi Tinggi (Jendela Listrik Motor DC di Mobil). Saya mencoba untuk mendapatkan motor DC untuk berjalan dalam dua arah sampai mencapai posisi akhir kemudian berhenti dan beralih polaritas sehingga akan berjalan ke arah lain saat daya disalurkan kembali. Kemudian lakukan hal yang sama di ujung lainnya.
1. timer menyalakan power selama 1 menit. (7:00 pagi -7: 01 pagi)
2. motor berjalan dalam satu arah sampai mencapai posisi berhenti, katakanlah 30 detik.
3. Daya ke motor mati ketika mencapai posisi berhenti dan penundaan selama 1 menit. timer untuk mengakhiri / mematikan daya utama. juga membalikkan polaritas sehingga.
4. lain kali timer utama menyala (10: 00-10: 01) memberi dosis yang sama ke arah sebaliknya dan berulang terus menerus
5. Motor Reverse 12 VDC (Hanya dua kabel dari motor + dan -)
6. Membutuhkan Indikator Led untuk motor Rev / Fwd
Bisakah Anda Membantu saya Pak?
Terima kasih sebelumnya atas bantuannya.
Ini adalah proyek rumah penting yang harus 100% andal.
Desain

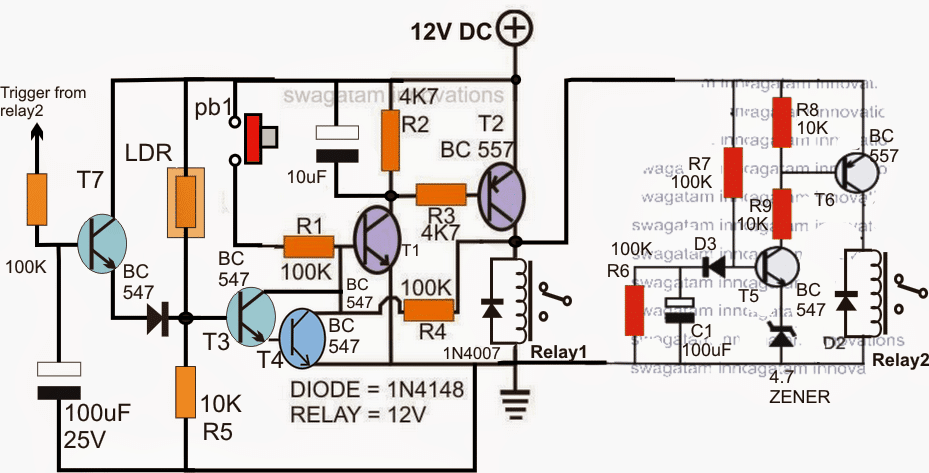
Pada gambar di atas, kita dapat memvisualisasikan desain untuk menerapkan gerakan maju mundur yang diusulkan dari motor inkubator setelah interval waktu yang telah ditentukan.
Saat daya dinyalakan, kami memiliki skenario berikut:
Sakelar magnet untuk 'set' dapat diasumsikan dalam keadaan nonaktif atau tertekan saat motor atau mekanisme inkubator yang dirancang berada dalam posisi awal nol.
Harap dicatat bahwa sebaiknya sakelar 'set' / 'reset' harus diterapkan menggunakan sakelar buluh magnet.
Dengan daya DIAKTIFKAN, IC 4060 diatur ulang melalui C2 sehingga memulai proses penghitungan dari nol, dan pin3 diberikan logika nol.
Logika nol awal ini diumpankan melalui C3 ke basis T1 yang secara instan menjalankan memaksa T3 dan relai terkaitnya untuk diaktifkan. R7 dalam prosesnya memastikan T1 / T3 terkunci dalam mode ini.
Relai DPDT pada titik ini bergerak pada kontak N / O-nya yang memulai motor dan mekanisme menuju gerakan 'maju' yang diasumsikan.
Begitu motor mulai bergerak, tombol 'set' dilepaskan sedemikian rupa sehingga T4 dan SPDT atas mendapat kesempatan untuk bergerak, di mana relai SPDT mencapai pergantian posisi N / O yang membuat kontak N / C DPDT dengan siaga Pasokan..
Motor dan / atau mekanisme terus bergerak hingga mencapai posisi 'reset' yang menyebabkan T2 mengaktifkan dan mematahkan kait T1 / T4.
Dengan T4 dimatikan, relai DPDT mengubah posisinya dari N / O ke N / C dan memberikan gerakan berlawanan (mundur) ke mekanisme motor.
Mekanisme motor inkubator sekarang membalik arahnya dan memulai gerakan mundur sampai mencapai titik 'set' yang dengan cepat mematikan drive dasar T4, SPDT mematikan daya pemotongan DPDT dan seluruh mekanisme menjadi diam. .
Sementara itu, IC 4060 terus menghitung hingga menghasilkan logika nol lagi setelah melalui logika tinggi pada pin3-nya (dengan melepaskan C3).
Siklus sekali lagi dimulai dan mengulangi prosedur seperti dijelaskan di atas.
Sebelumnya: Mengedipkan LED dengan Arduino - Tutorial Lengkap Berikutnya: Penekan Gelombang Induk Industri Daya Tinggi Dijelajahi


![Sirkuit Bunga LED Berkilauan [Efek Lampu LED Warna-warni]](https://electronics.jf-parede.pt/img/3-phase-power/3B/glittering-led-flower-circuit-multicolored-led-light-effect-1.jpg)