Posting ini membahas pengatur kecepatan engine elektronik atau rangkaian pengontrol menggunakan loop sinyal umpan balik RPM melalui jaringan sensor efek hall. Ide tersebut diminta oleh Bapak Imsa Naga.
Tujuan dan Persyaratan Sirkuit
- Terima kasih banyak atas waktunya. Saya yakin sirkuit ini akan cocok untuk suplai satu fasa. Alternator saya adalah 3 fase 7KvA dan saya ingin memasangkannya dengan mesin kendaraan diesel yang memiliki akselerator sebagai pengganti pengatur kecepatan.
- Yang ingin saya terapkan adalah - 'GUBERNUR KECEPATAN MESIN ELEKTRONIK' yang mungkin memiliki mekanisme yang dikendalikan servo elektronik seperti- Sirkuit Sensor Kecepatan (sensor RPM Mesin) untuk menggerakkan motor servo untuk menggerakkan mekanisme akselerator untuk mempertahankan kecepatan konstan mesin sehubungan dengan beban yang diterapkan ke alternator.
- Ini akan membantu dalam mempertahankan frekuensi serta tegangan generator. Saya akan dapat menangani aspek mekanis, jika Anda dengan baik hati merancang sirkuit untuk mengontrol motor Servo sedemikian rupa sehingga dapat diputar ke kedua arah sehubungan dengan perubahan RPM mesin. Terima kasih banyak atas antisipasi.
Diagram Sirkuit

CATATAN: MOTOR DAPAT DIGANTI DENGAN SOLENOID LOADED SPRING 12 V
Desain
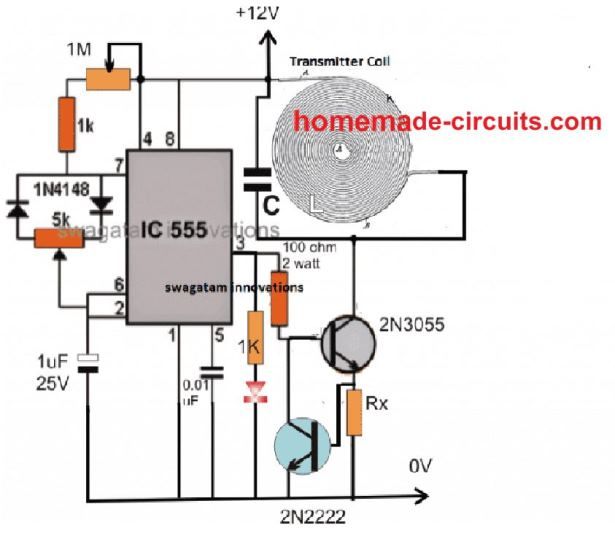
Rangkaian pengatur atau pengontrol kecepatan mesin diesel dapat dilihat pada gambar di atas menggunakan prosesor RPM umpan balik atau a sirkuit tachometer
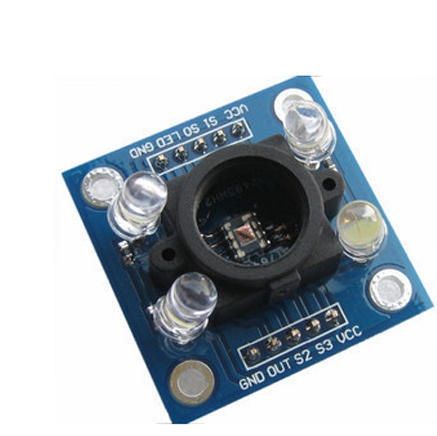
Bagian kiri panggung IC1 555 membentuk rangkaian takometer sederhana yang dikonfigurasi dengan a Sensor efek hall dipasang dengan roda beban mesin untuk merasakan laju RPM-nya.
RPM diubah menjadi denyut nadi atau frekuensi yang bervariasi secara proporsional dan diterapkan di dasar BJT untuk mengubah pin # 2 dari IC1.
Operasi Sirkuit
IC1 pada dasarnya dicurangi dalam mode monostabil yang menyebabkan outputnya menghasilkan sakelar ON / OFF yang menyesuaikan secara proporsional, yang periodenya diatur menggunakan pot 1M yang ditunjukkan.
Output dari IC1 yang membawa konten RPM dalam bentuk pulsa berjangka waktu diperpanjang cukup dihaluskan oleh tahap integrator yang terdiri dari beberapa komponen RC menggunakan resistor 1K, 10K dan 22uF. Kapasitor 2.2uF.
Tahap ini mengubah data RPM kasar monostabil menjadi tegangan yang bervariasi dengan lancar atau bervariasi secara eksponensial.
Tegangan yang bervariasi secara eksponensial ini dapat dilihat terhubung dengan pin # 5 dari tahap IC2 555 berikutnya yang dikonfigurasi sebagai rangkaian astabil.
Fungsi astabil ini adalah untuk menghasilkan keluaran PWM yang sangat sempit atau rendah pada pin # 3 pada kondisi operasi normalnya.
Di sini kondisi operasi normal mengacu pada situasi ketika RPM yang dirasakan berada dalam batas yang ditentukan dan pin # 5 dari IC2 tidak mendapatkan input tegangan dari pengikut emitor. Output PWM rendah ini dapat diimplementasikan dengan menyesuaikan dua resistor 100k dan kapasitor 1uF yang terkait dengan pin IC2 # 6/2 dan pin # 7.
PWM rendah dari pin # 3 dari IC2 ini tidak dapat mengganti TIP122 dengan cukup keras dan oleh karena itu rakitan roda motor yang ditunjukkan tidak dapat memperoleh momentum yang diperlukan dan oleh karena itu tetap dinonaktifkan.
Namun ketika RPM mulai naik, tachometer mulai menghasilkan tegangan yang lebih tinggi secara eksponensial yang pada gilirannya menyebabkan tegangan meningkat secara proporsional pada pin # 5 dari IC2.
Hal ini selanjutnya memungkinkan TIP122 untuk bekerja lebih keras, dan motor yang terhubung memperoleh torsi yang cukup, sehingga mulai menekan pedal akselerator yang terpasang ke mode perlambatan.
Prosedur ini memaksa mesin diesel untuk mengurangi kecepatannya, yang menyebabkan tachometer dan tahapan PWM kembali ke kondisi semula, dan memaksakan kecepatan terkontrol yang diperlukan untuk motor diesel.
Alih-alih pengaturan motor akselerator yang ditunjukkan, kolektor TIP122 dapat dihubungkan dengan kabel CDI unit dari mesin diesel untuk pengurangan kecepatan yang identik, untuk memfasilitasi kondisi padat dan implementasi yang lebih andal dari kontrol kecepatan engine elektronik yang dibahas atau sirkuit pengatur kecepatan engine elektronik.
Cara Mengatur
Awalnya jaga agar IC1, tahapan IC2 terputus dengan melepas tautan pengikut emitor dengan pin # 5 dari IC2.
Selanjutnya pastikan bahwa dua resistor 100k diubah dan disetel dengan tepat sehingga pin # 3 dari IC2 menghasilkan PWM yang paling sempit (@ kira-kira 5% tingkat waktu ON).
Setelah ini, gunakan file 0 hingga 12V catu daya yang dapat disesuaikan , terapkan tegangan yang bervariasi pada pin # 5 dari IC2 dan konfirmasikan PWM yang meningkat secara proporsional pada pin # 3.
Setelah bagian astabil diuji, takometernya harus diperiksa dengan menerapkan pulsa RPM yang diketahui sesuai dengan RPM batas berlebih yang diinginkan. Selama penyesuaian preset basis BJT pengikut emitor sedemikian rupa sehingga emitornya dapat menghasilkan setidaknya 10V atau level yang cukup untuk menyebabkan PWM IC2 menghasilkan torsi yang diperlukan pada motor kontrol pedal yang terhubung.
Setelah beberapa penyesuaian dan eksperimen lebih lanjut, Anda dapat berharap untuk mencapai kontrol kecepatan otomatis yang diperlukan untuk mesin dan beban yang terkait dengannya.
MEMPERBARUI
Jika motor diganti dengan solenoid bermuatan pegas, maka desain di atas dapat lebih disederhanakan seperti yang diberikan di bawah ini:

Poros solenoid dapat digabungkan dengan pedal akselerator untuk mencapai regulasi kecepatan engine otomatis yang diinginkan.
Untuk opsi lebih lanjut mengenai konverter frekuensi ke tegangan, Anda dapat merujuk ke artikel ini .
Sepasang: Sirkuit Aplikasi Gym Kebugaran Terkendali Timer Berikutnya: Mengisi Baterai dengan Sirkuit Piezo Mat






![Dioda Kontak Titik [Sejarah, Konstruksi, Sirkuit Aplikasi]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)