Pada postingan kali ini kita mempelajari cara membuat kursi roda listrik sederhana menggunakan rangkaian driver motor BLDC standar, dan sepasang motor BLDC berdaya tinggi.
pengantar
Pengenalan kursi roda elektrik seperti anugerah bagi banyak teman kami yang memiliki kemampuan berbeda yang sekarang merasa lebih mudah untuk bergerak dan bepergian, dengan mudah, hanya dengan menekan sebuah tombol.
Satu-satunya bagian yang mahal dan rumit dalam desain kursi roda adalah perhitungan ergonomisnya, dan efisiensi mekanisme roda, sedangkan elektronik untuk mengendalikan sistem tampaknya lebih murah dan rumit.
Jika produsen memiliki akses ke desain kursi roda yang paling efektif dan ergonomis maka pembuatan bagian kelistrikan / elektronik pada sistem dapat segera dilaksanakan dengan menerapkan langkah-langkah seperti yang dijelaskan pada penjelasan berikut.
Spesifikasi
Untuk membuat kursi roda listrik, komponen utama yang diperlukan untuk ini mungkin sesuai dengan daftar berikut:
1) BLDC Motors - 2nos (masing-masing 250 watt)

2) Perakitan badan kursi roda
3) Sirkuit Driver BLDC
4) Baterai Deep Cycle atau lebih disukai Li-ion - 2nos masing-masing 24V 60AH

Kecuali rangkaian driver BLDC sisa bahan dapat diperoleh siap pakai dari pasar.
Meskipun saya telah menyajikan banyak sirkuit driver BLDC di situs web ini, saya akan memilih yang terlihat lebih menjanjikan dan efektif karena fiturnya yang fleksibel dalam hal spesifikasi motor dan kapasitas penanganan daya.
Pada postingan terakhir saya membahas yang tergolong sederhana namun Rangkaian driver universal BLDC menggunakan IC ML4425 , dan akan menggunakan desain yang sama untuk sirkuit pengemudi motor kursi roda elektrik kami saat ini.
Karena spesifikasi tanpa sensornya, rangkaian memungkinkan Anda untuk menggabungkan semua jenis motor 3-fase terlepas dari apakah motor tersebut memiliki sensor atau tidak, dan tanpa batasan arus (Amp) yang diperlukan untuk menggerakkan motor.
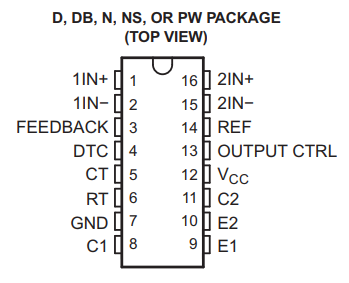
Skema lengkapnya dapat disaksikan pada gambar berikut:
Diagram Sirkuit

Itu spesifikasi teknis untuk driver BLDC tanpa sensor di atas sudah dijelaskan di posting kami sebelumnya, oleh karena itu Anda dapat merujuk hal yang sama untuk mempelajari detailnya secara mendalam.
Kontrol sebenarnya cukup mudah dan akan memungkinkan kontrol dan manuver yang mudah bagi pengguna yang mengoperasikan kursi roda.
Sakelar RUN / BRAKE dapat berupa sakelar DPDT tugas berat tunggal yang dapat digunakan oleh operator untuk menghentikan kursi roda secara instan, kapan pun diperlukan.
Kecepatan wheeelchair dapat dengan mudah dikontrol dengan menggeser kenop R18 searah jarum jam / berlawanan arah jarum jam. Panci ini harus berkualitas sangat baik, lebih disukai jenis multi-putaran, seperti yang ditunjukkan di bawah ini.
Spesifikasi Potensiometer

Tegangan suplai memiliki jangkauan yang luas, mulai dari 24V hingga 80V, yang berarti lebih banyak baterai dapat dihubungkan secara seri untuk mengoperasikan motor dengan tegangan lebih tinggi, yang pada gilirannya akan memungkinkan pabrikan untuk memasukkan motor dan baterai berukuran lebih kecil, memastikan kursi roda yang kompak dan lebih ringan .
Kedua motor yang digabungkan dengan roda belakang dapat disambungkan secara paralel dan digerakkan menggunakan sirkuit driver BLDC yang ditunjukkan di atas.
Jika Anda memiliki pertanyaan khusus mengenai rangkaian kursi roda listrik yang dijelaskan di atas menggunakan motor BLDC, jangan ragu untuk mengungkapkannya melalui kotak pencarian yang diberikan di bawah ini.
MEMPERBARUI:
Desain di atas tidak memiliki fitur pembalikan motor yang penting, desain yang lebih baik yang memiliki fitur pembalikan dapat ditemukan di lembar data pdf berikut:
https://www.elprocus.com/wp-content/uploads/2018/04/BLDC-driver.pdf
Klip video:
Sepasang: Pengontrol Motor BLDC Tanpa Sensor Arus Tinggi menggunakan EMF Belakang Berikutnya: Cara Kerja Senter Engkol