
Biasanya, robot kendali jarak jauh menggunakan sirkuit RF, yang memiliki kekurangan dari jangkauan kerja terbatas, kendali terbatas dan jangkauan frekuensi terbatas. Untuk mengatasi kekurangan tersebut, ponsel yang dioperasikan land rover kendaraan robotik digunakan. Ini memberikan keuntungan dari kontrol robotik, pengendali bebas intrusi dan hingga dua belas sistem pengendali, dll.
Meski kemampuan dan penampilannya robotika tertanam sangat bervariasi, semua robot berbagi fitur struktur mekanis yang dapat digerakkan di bawah beberapa bentuk kontrol. Pengendalian robot melibatkan tiga fase berbeda yaitu persepsi, pemrosesan, dan tindakan. Biasanya, sensor dipasang pada robot. Persepsi dan pemrosesan dilakukan oleh mikrokontroler on-board, dan tindakan dilakukan menggunakan motor.
Kendaraan Robot Land Rover Yang Dioperasikan Ponsel

Kendaraan Robot Land Rover yang Dioperasikan Ponsel oleh Edgefxkits.com
Tujuan utama dari proyek ini adalah untuk mengontrol lengan robotik yang dipasang pada kendaraan robotik dengan menggunakan telepon genggam. Ini memberikan jangkauan kerja yang besar dan kontrol yang kuat dll.
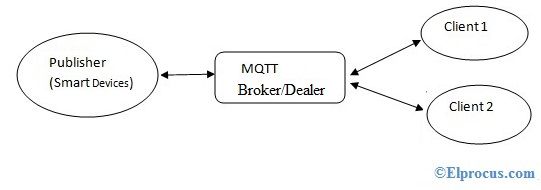
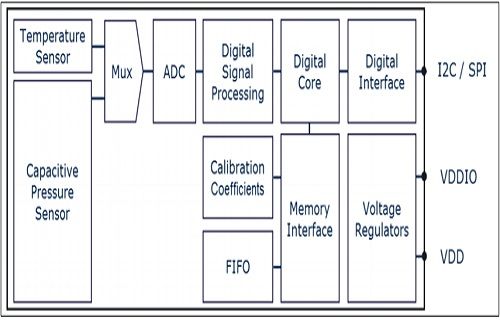
Diagram Blok Kendaraan Robot Land Rover Yang Dioperasikan Ponsel:

Diagram Blok Land Rover yang Dioperasikan Ponsel
Blok bangunan utama adalah mikrokontroler, Ponsel, Decoder DTMF dan rangkaian DC-Motor-driver. Ponsel merupakan bagian terpenting dari keseluruhan sistem karena seluruh sistem bekerja dan diaktifkan oleh ponsel. DTMF (nada ganda multi frekuensi) menerima sinyal masukan dari ponsel dan mendekodekannya, dan kemudian menghasilkan keluaran digital 4-bit dari 8051 mikrokontroler . Ketika dekoder DTMF memberikan keluaran digital, itu juga menghasilkan interupsi setiap saat.
Mikrokontroler adalah jantung dari keseluruhan sistem karena ia melakukan seluruh tindakan pengendalian. Mikrokontroler bergantung pada kode yang dihasilkan oleh decoder DTMF untuk menggerakkan penjelajah ke kanan atau kiri dan maju atau mundur dengan memutar kedua motor DC. Penggerak motor DC menerima sinyal pengaktifan dari mikrokontroler dalam hal logika rendah atau tinggi, kemudian memperkuat dan memutar dua motor di kedua arah.
Pengendalian robot terutama melibatkan empat fase berbeda: persepsi, pemrosesan tindakan, dan deteksi. Pada tahap persepsi jika ponsel yang terpasang pada robot menerima panggilan, maka tindakan menekan tombol pada ponsel tersebut menerjemahkan nada DTMF yang dihasilkan. Kemudian, chip decoder menerima sinyal audio dari ponsel, kemudian mengubah nada DTMF tersebut menjadi kode biner, yang kemudian diumpankan ke mikrokontroler. Dalam proyek ini, IC MT88710 digunakan sebagai dekoder DTMF. Pada tahap pemrosesan, mikrokontroler memproses kode biner yang diterima dari decoder DTMF. Itu Mikrokontroler sudah diprogram sebelumnya dalam 'C' untuk melakukan tugas khusus ini sesuai dengan bit masukan.
Pada tahap aksi, putaran motor bergantung pada input yang diberikan oleh mikrokontroler. Dua motor DC masing-masing 30 RPM digunakan untuk landrover dan digerakkan oleh IC driver motor. Pada tahap deteksi, dan untuk deteksi halangan, sebuah pemancar dan penerima inframerah digunakan bersama dengan bel. Ketika rintangan datang di depan robot, pemancar IR memancarkan sinar IR pada benda, kemudian benda tersebut memantulkan sinar IR ke penerima IR. Penerima IR kemudian menerima sinar IR untuk mengaktifkan bel.
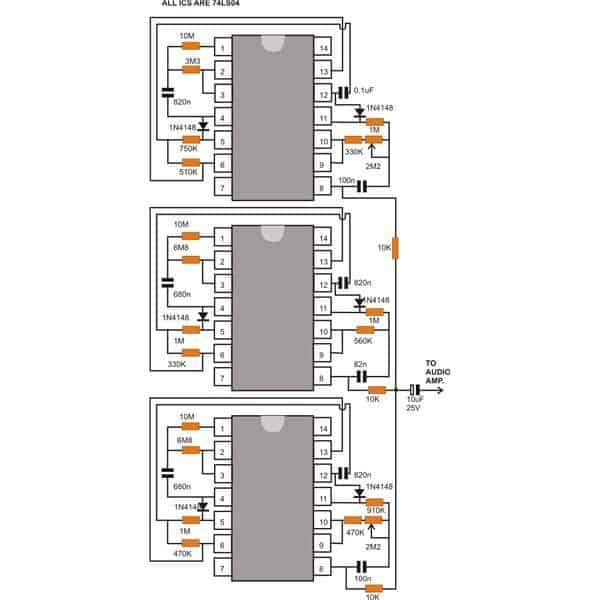
Diagram Sirkuit Kendaraan Robot Land rover yang dioperasikan dengan ponsel:
Komponen utama dari robot landrover yang dioperasikan oleh ponsel ini adalah mikrokontroler, driver motor dan decoder DTMF. Dekoder DTMF seri MT8870 digunakan dalam proyek ini yang menggunakan teknik penghitungan digital untuk mendeteksi 16 pasangan nada DTMF menjadi keluaran kode 4-bit. Sirkuit dialtone built-in menghilangkan penyaringan. Jika sinyal input diberikan pada pin2, maka konfigurasi input dianggap efektif. Sinyal 4-bit-decode dari nada DTMF ditransfer ke pin11 melalui output pin 14. Pin ini dihubungkan ke pin mikrokontroler Pao, Pa1, Pa2 dan Pa3. Output mikrokontroler dari pin port PD0 melalui PD3 dan PD7 diumpankan ke input IN1, IN4 dan mengaktifkan pin EN1, EN2 dari IC L293D driver motor ke menggerakkan dua motor DC .

Diagram Sirkuit Land Rover yang Dioperasikan Ponsel
Di sirkuit ini, saklar S1 digunakan untuk reset manual. Output dari mikrokontroler tidak cukup untuk menggerakkan motor DC, sehingga diperlukan driver arus untuk putaran motor. Driver motor L293D dirancang untuk memberikan arus penggerak dua arah hingga 600 mA pada tegangan dari 4,5V hingga 36V, yang membuatnya lebih mudah untuk menggerakkan motor DC. Pengemudi motor L293D terdiri dari empat pengemudi. Pin IN1 hingga IN4 & OUT1 dan OUT4 adalah pin input dan output dari driver 1 hingga driver 4. Driver 1,2,3 dan 4 diaktifkan dengan pin pengaktifan1 (EN1) dan pin 9 (EN2). Saat mengaktifkan input EN1 (pin1) tinggi, driver 1 dan 2 diaktifkan. Demikian pula, input pengaktifan EN2 (pin9) mengaktifkan driver 3.
Keuntungan dan kerugian:
Keunggulan dari landrover robotik yang dioperasikan oleh ponsel antara lain sistem penyediaan dan pengawasan pengendali nirkabel, navigasi kendaraan berbasis teknologi 3G, dan jangkauan operasional tanpa batas berdasarkan jaringan ponsel. Kerugiannya antara lain: biaya tagihan ponsel tinggi pengosongan baterai ponsel : masalah pemakaian yang terkait dengan baterai karena baterai kehilangan daya karena cepat habis karena bebannya memiliki kemampuan beradaptasi yang tinggi: sistem tidak dapat beradaptasi dengan semua ponsel, tetapi yang dengan headset terpasang hanya dapat digunakan.
Dengan demikian, proyek robot yang dioperasikan oleh Ponsel ini sangat berguna dalam aplikasi militer untuk mengendalikan kendaraan militer dengan menggunakan telepon genggam. Kedepannya, kita bisa mendeteksi posisi musuh dengan mengatur a kamera nirkabel ke kendaraan robotik land rover. Proyek ini juga dapat membantu dalam bidang akademis karena siswa dapat mempelajari berbagai terminologi dan prinsip yang diusulkan dalam proyek ini. Proyek ini akan membantu siswa menambahkan pemikiran dan ide inovatif mereka mengembangkan proyek robotika .
Kredit Foto:
- Ponsel Dioperasikan Land Rover Oleh santoshbanisetty
- Diagram Sirkuit Land Rover Yang Dioperasikan Ponsel Oleh insinyur garasi






{kind=link}