
Definisi
Motor DC brushless terdiri dari rotor berupa magnet permanen dan stator berupa belitan armatur polifase. Ini berbeda dari motor dc konvensional karena tidak mengandung sikat dan pergantian dilakukan menggunakan listrik, menggunakan penggerak elektronik untuk memberi makan belitan stator.
Pada dasarnya motor BLDC dapat dibangun dengan dua cara - dengan menempatkan rotor di luar inti dan belitan di inti dan lainnya dengan menempatkan belitan di luar inti. Dalam pengaturan sebelumnya, magnet rotor bertindak sebagai insulator dan mengurangi laju disipasi panas dari motor dan beroperasi pada arus rendah. Ini biasanya digunakan pada kipas angin. Dalam pengaturan terakhir, motor membuang lebih banyak panas, sehingga menyebabkan peningkatan torsi. Ini digunakan dalam drive hard disk.

BLDC
Pengoperasian Motor 4 Pole 2 Phase
Motor DC brushless digerakkan oleh penggerak elektronik yang mengalihkan tegangan suplai antara belitan stator saat rotor berputar. Posisi rotor dipantau oleh transduser (optik atau magnet) yang memasok informasi ke pengontrol elektronik dan berdasarkan posisi ini, belitan stator yang akan diberi energi ditentukan. Penggerak elektronik ini terdiri dari transistor (2 untuk setiap fase) yang dioperasikan melalui mikroprosesor.

BLDC-DC
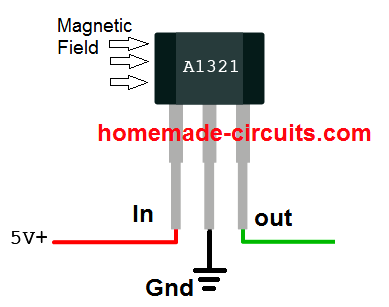
Medan magnet yang dihasilkan oleh magnet permanen berinteraksi dengan medan yang diinduksi oleh arus pada belitan stator, menciptakan torsi mekanis. Sirkuit sakelar elektronik atau penggerak mengalihkan arus suplai ke stator untuk mempertahankan sudut konstan 0 hingga 90 derajat antara bidang yang berinteraksi. Sensor Hall sebagian besar dipasang di stator atau di rotor. Ketika rotor melewati sensor hall, berdasarkan Kutub Utara atau Selatan, itu menghasilkan sinyal tinggi atau rendah. Berdasarkan kombinasi sinyal ini, belitan yang akan diberi energi ditentukan. Untuk menjaga agar motor tetap berjalan, medan magnet yang dihasilkan oleh belitan harus bergeser posisinya, seiring dengan pergerakan rotor untuk mengejar medan stator.

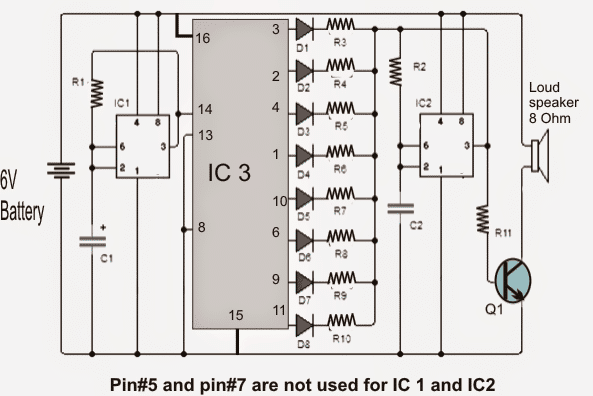
Sirkuit
Pada motor dc brushless 4 kutub, 2 fasa, digunakan sensor hall tunggal, yang disematkan pada stator. Saat rotor berputar, sensor hall merasakan posisi dan mengembangkan sinyal tinggi atau rendah, tergantung pada kutub magnet (Utara atau Selatan). Sensor hall dihubungkan melalui resistor ke transistor. Ketika sinyal tegangan tinggi terjadi pada output sensor, transistor yang terhubung ke koil A mulai berjalan, menyediakan jalur untuk arus mengalir dan dengan demikian memberi energi pada koil A. Kapasitor mulai mengisi daya ke tegangan suplai penuh. Ketika sensor hall mendeteksi perubahan polaritas rotor, ia mengembangkan sinyal tegangan rendah pada outputnya dan karena transistor 1 tidak mendapatkan suplai apa pun, ia dalam kondisi cutoff. Tegangan yang dikembangkan di sekitar kapasitor adalah Vcc, yang merupakan tegangan suplai ke 2ndtransistor, dan kumparan B sekarang diberi energi, saat arus melewatinya.
Motor BLDC memiliki magnet permanen tetap, yang berputar dan dinamo tetap, menghilangkan masalah dalam menghubungkan arus ke angker bergerak. Dan mungkin lebih banyak kutub pada rotor daripada stator atau motor keengganan. Yang terakhir mungkin tanpa magnet permanen, hanya kutub yang diinduksi pada rotor kemudian ditarik ke dalam pengaturan dengan belitan stator berjangka waktu. Pengontrol elektronik menggantikan rakitan sikat / komutator dari motor DC yang disikat, yang secara terus menerus mengalihkan fase ke belitan untuk menjaga motor tetap berputar. Pengontrol melakukan distribusi daya waktu komparatif dengan menggunakan sirkuit solid-state, bukan sistem sikat / komutator.

Motor BLDC
7 Keuntungan Motor DC Tanpa Sikat
- Kecepatan yang lebih baik versus karakteristik torsi
- Respon dinamis tinggi
- Efisiensi tinggi
- Umur operasi yang lama karena kurangnya listrik dan kerugian gesekan
- Operasi tanpa suara
- Rentang kecepatan yang lebih tinggi
Aplikasi:
Harga Motor DC Brushless telah menurun sejak diperkenalkan, karena perkembangan material dan desain. Penurunan biaya ini, ditambah dengan banyak titik fokus yang dimilikinya di atas Motor Brush DC, menjadikan Motor DC Brushless sebagai komponen yang populer dalam berbagai aplikasi khusus. Aplikasi yang menggunakan BLDC Motor termasuk, namun tidak dibatasi untuk:
- Elektronik konsumen
- Mengangkut
- Pemanasan dan ventilasi
- Teknik Industri
- Rekayasa model
Prinsip Kerja
Prinsip kerja motor BLDC sama seperti untuk motor DC yang disikat, yaitu umpan balik posisi poros internal. Dalam kasus motor DC yang disikat, umpan balik diimplementasikan menggunakan komutator mekanis dan sikat. Dalam motor BLDC, ini dicapai dengan menggunakan beberapa sensor umpan balik. Pada motor BLDC kami kebanyakan menggunakan sensor efek Hall, setiap kali kutub magnet rotor lewat di dekat sensor hall, mereka menghasilkan sinyal level TINGGI atau RENDAH, yang dapat digunakan untuk menentukan posisi poros. Jika arah medan magnet dibalik, tegangan yang dikembangkan juga akan berbalik.
Mengontrol Motor BLDC
Unit Kontrol yang diimplementasikan oleh mikroelektronik memiliki beberapa pilihan teknologi tinggi. Ini dapat diterapkan menggunakan mikrokontroler, mikrokontroler khusus, unit mikroelektronik kabel, PLC, atau unit serupa lainnya.
Pengontrol analog masih menggunakan, tetapi tidak dapat memproses pesan umpan balik dan mengontrolnya sesuai. Dengan jenis rangkaian kontrol ini, dimungkinkan untuk menerapkan algoritme kontrol berkinerja tinggi, seperti kontrol vektor, kontrol berorientasi medan, kontrol kecepatan tinggi yang semuanya terkait dengan keadaan elektromagnetik motor. Selanjutnya kontrol loop luar untuk berbagai persyaratan dinamika seperti kontrol motor geser, kontrol adaptif, kontrol prediktif ... dll juga diterapkan secara konvensional.
Selain semua ini, kami menemukan PIC kinerja tinggi (Sirkuit Terpadu Daya), ASIC (Sirkuit Terpadu Khusus Aplikasi)… dll. yang dapat sangat menyederhanakan konstruksi kontrol dan unit elektronik daya keduanya. Misalnya, saat ini kami memiliki regulator PWM (Pulse Width Modulation) lengkap dalam satu IC yang dapat menggantikan seluruh unit kontrol di beberapa sistem. IC driver majemuk dapat memberikan solusi lengkap untuk menggerakkan keenam sakelar daya dalam konverter tiga fase. Ada banyak sirkuit terintegrasi serupa dengan penambahan hari demi hari. Pada akhirnya, perakitan sistem mungkin hanya akan melibatkan satu perangkat lunak kontrol dengan semua perangkat keras datang ke bentuk dan bentuk yang tepat.
Gelombang PWM (Pulse Width Modulation) dapat digunakan untuk mengontrol kecepatan motor. Di sini tegangan rata-rata diberikan atau arus rata-rata yang mengalir melalui motor akan berubah tergantung pada waktu ON dan OFF dari pulsa yang mengendalikan kecepatan motor yaitu Siklus kerja gelombang mengontrol kecepatannya. Saat mengubah duty cycle (ON time), kita bisa mengubah kecepatan. Dengan menukar port keluaran, secara efektif akan mengubah arah motor.
Kontrol kecepatan
Kontrol kecepatan motor BLDC penting untuk membuat motor bekerja pada kecepatan yang diinginkan. Kecepatan motor dc tanpa sikat dapat dikontrol dengan mengontrol tegangan dc masukan. Semakin tinggi voltase, semakin tinggi kecepatannya. Ketika motor bekerja dalam mode normal atau berjalan di bawah kecepatan pengenal, tegangan input jangkar diubah melalui model PWM. Ketika motor dioperasikan di atas kecepatan pengenal, fluks dilemahkan dengan cara memajukan arus keluar.
Kontrol kecepatan dapat berupa kontrol kecepatan loop tertutup atau loop terbuka.
Kontrol Kecepatan Loop Terbuka - Ini melibatkan pengendalian tegangan dc yang diterapkan ke terminal motor dengan memotong tegangan dc. Namun, ini menghasilkan beberapa bentuk pembatasan arus.
Kontrol Kecepatan Loop Tertutup - Ini melibatkan pengendalian tegangan suplai input melalui umpan balik kecepatan dari motor. Jadi tegangan suplai dikontrol tergantung pada sinyal kesalahan.
Kontrol kecepatan loop tertutup terdiri dari tiga komponen dasar.
- Sirkuit PWM untuk menghasilkan pulsa PWM yang dibutuhkan. Ini bisa berupa mikrokontroler atau IC timer.
- Perangkat penginderaan untuk merasakan kecepatan motor yang sebenarnya. Ini bisa berupa sensor efek hall, sensor infra merah, atau encoder optik.
- Penggerak motor untuk mengontrol operasi motor.
Teknik mengubah tegangan suplai berdasarkan sinyal kesalahan dapat dilakukan melalui teknik pengendalian pid atau menggunakan logika fuzzy.
Aplikasi untuk Kontrol Kecepatan Motor DC Brushless

Kontrol Motor DC BLDC
Pengoperasian motor dikendalikan dengan menggunakan optocoupler dan pengaturan MOSFET, dimana daya input DC dikontrol melalui teknik PWM dari mikrokontroler. Saat motor berputar, led inframerah yang ada di porosnya diterangi dengan cahaya putih karena adanya titik putih pada porosnya dan memantulkan cahaya inframerah. Fotodioda menerima cahaya infra merah ini dan mengalami perubahan resistansi, sehingga menyebabkan perubahan tegangan suplai ke transistor yang terhubung dan pulsa diberikan ke mikrokontroler untuk menghasilkan jumlah rotasi per menit. Kecepatan ini ditampilkan di LCD.
Kecepatan yang dibutuhkan dimasukkan ke dalam keypad yang dihubungkan ke Mikrokontroler. Perbedaan antara kecepatan yang dirasakan dan kecepatan yang diinginkan adalah sinyal kesalahan dan mikrokontroler menghasilkan sinyal PWM sesuai sinyal kesalahan, berdasarkan logika fuzzy untuk memberikan masukan daya dc ke motor.
Jadi dengan menggunakan kontrol loop tertutup, kecepatan motor dc tanpa sikat dapat dikontrol dan dapat dibuat untuk berputar pada kecepatan yang diinginkan.
Kredit Foto:
- BLDC oleh nmbtc
- BLDC-DC oleh pcbheaven.dll






{kind=link}