Dalam posting ini kita akan belajar tentang rangkaian sederhana yang memungkinkan fitur penyesuaian manual untuk waktu percikan CDI sepeda motor baik untuk mencapai pengapian di muka, pengapian terbelakang atau hanya pengapian berjangka waktu normal.
Setelah mempelajari secara komprehensif tentang subjek, saya ternyata berhasil merancang sirkuit ini yang dapat digunakan oleh semua pengendara sepeda motor untuk mencapai peningkatan kecepatan dan efisiensi bahan bakar dengan menyesuaikan waktu pengapian mesin kendaraan sesuai keinginan, tergantung pada kecepatan seketika.
Waktu Percikan Pengapian
Kita semua tahu bahwa waktu percikan api yang dihasilkan di dalam mesin kendaraan sangat penting dalam hal efisiensi bahan bakar, masa pakai mesin, dan kecepatan kendaraan, percikan CDI yang salah waktu dapat menghasilkan kendaraan yang berjalan dengan buruk dan sebaliknya.
Waktu penyalaan yang disarankan untuk percikan api di dalam ruang bakar adalah saat piston berada sekitar 10 derajat setelah melewati titik TDC (Top Dead Center). Kumparan pickup disetel untuk menyesuaikan ini dan setiap kali piston mencapai tepat sebelum TMA, kumparan pickup memicu koil CDI untuk menyalakan percikan, disebut sebagai BTDC (sebelum titik mati atas.
Pembakaran yang dilakukan dengan proses di atas umumnya menghasilkan fungsi mesin dan emisi yang baik.
Namun hal di atas bekerja dengan baik hanya selama mesin bekerja pada kecepatan rata-rata yang disarankan, tetapi untuk sepeda motor yang dirancang untuk mencapai kecepatan luar biasa, gagasan di atas mulai tidak berfungsi dan sepeda motor terhalang untuk mencapai kecepatan tinggi yang ditentukan.
Menyinkronkan Waktu Percikan dengan Kecepatan yang Bervariasi
Hal ini terjadi karena pada kecepatan yang lebih tinggi piston bergerak jauh lebih cepat daripada yang dapat diantisipasi oleh percikan api. Meskipun rangkaian CDI memulai pemicuan dengan benar, dan mencoba untuk melengkapi posisi piston, pada saat percikan dapat menyala di busi, piston telah bergerak jauh di depan TMA, menyebabkan skenario pembakaran yang tidak diinginkan pada mesin. Hal ini pada gilirannya menghasilkan inefisiensi, mencegah mesin mencapai batas kecepatan lebih tinggi yang ditentukan.
Oleh karena itu untuk mengoreksi waktu penyalaan penyalaan, kita perlu sedikit memajukan penembakan busi dengan memerintahkan pemicu yang sedikit maju untuk rangkaian CDI, dan untuk kecepatan yang lebih lambat ini hanya perlu dibalik dan penembakan perlu sedikit diperlambat memungkinkan efisiensi optimal untuk mesin kendaraan.
Kami akan membahas semua parameter ini dengan sangat terperinci di beberapa artikel lain, saat ini kami ingin menganalisis metode yang memungkinkan kami mencapai penyesuaian manual waktu percikan pengapian baik untuk maju, mundur, atau bekerja secara normal sesuai kecepatan. dari sepeda motor.
Waktu Penjemputan mungkin Tidak Cukup Andal
Dari pembahasan di atas kita dapat menyimpulkan bahwa pickup coil trigger tidak hanya dapat diandalkan untuk sepeda motor berkecepatan tinggi, dan beberapa cara untuk meningkatkan sinyal pickup menjadi keharusan.
Biasanya ini dilakukan dengan menggunakan mikrokontroler, saya telah mencoba untuk mencapai hal yang sama dengan menggunakan komponen biasa, tampaknya itu desain yang secara logis layak, meskipun hanya tes praktis yang dapat memastikan kegunaannya.

Merancang Prosesor Advance Retard CDI Elektronik
Mengacu pada desain di atas dari rangkaian pengatur waktu percikan dan penghitung waktu percikan CDI yang dapat disesuaikan di atas, kita dapat melihat IC 555 biasa dan rangkaian IC 4017 yang dipasang dalam standar ' Sirkuit lampu chaser LED 'mode.
IC 555 diatur seperti astabil yang menghasilkan dan memberi makan pulsa clock ke pin # 14 dari IC 4017 yang pada gilirannya merespons pulsa ini dan menghasilkan logika tinggi 'melompat' di pinout outputnya mulai dari pin # 3 hingga pin # 11 lalu kembali ke pin # 3.
Sepasang BJT NPN / PNP dapat dilihat di sisi kiri diagram, ini diposisikan untuk mengatur ulang dua IC sebagai respons terhadap sinyal yang diterima dari koil pickup sepeda motor.
Sinyal koil pickup diumpankan ke dasar NPN yang meminta IC untuk mengatur ulang dan memulai kembali osilasi, setiap kali koil pickup merasakan revolusi yang lengkap oleh roda gila terkait.
Mengoptimalkan Frekuensi IC 555
Sekarang, frekuensi IC 555 diatur sedemikian rupa sehingga pada saat koil pickup mendeteksi satu revolusi dan mengatur ulang IC, IC 555 mampu menghasilkan sekitar 9 hingga 10 pulsa yang memungkinkan IC 4017 untuk membuat tinggi hingga pin # 11 atau setidaknya hingga pinout # 9.
Di atas dapat diatur untuk putaran yang sesuai dengan kecepatan idle sepeda motor.
Ini berarti bahwa selama kecepatan idle, sinyal pickup coil akan memungkinkan output 4017 bergerak melalui hampir semua pinout sampai reset kembali ke pin # 3.
Namun, sekarang mari kita coba mensimulasikan apa yang akan terjadi pada kecepatan yang lebih tinggi.
Respon pada Kecepatan Kendaraan Lebih Tinggi
Pada kecepatan yang lebih tinggi, sinyal pickup akan menghasilkan sinyal yang lebih cepat daripada pengaturan normal, dan itu akan mencegah IC 555 menghasilkan 10 pulsa yang ditentukan, jadi mungkin sekarang ini akan dapat menghasilkan katakanlah sekitar 7 pulsa atau 6 pulsa pada a mengingat kecepatan kendaraan yang lebih tinggi.
Hal ini pada gilirannya akan mencegah IC 4017 mengaktifkan semua outputnya menjadi tinggi, sebaliknya sekarang hanya dapat melakukan sejauh pin # 6 atau pin # 5, setelah itu pickup akan memaksa IC untuk mengatur ulang.
Membagi Flywheel menjadi 10 Divisi Maju / Perlambatan
Dari pembahasan diatas kita dapat mensimulasikan situasi dimana pada kecepatan idle, keluaran dari IC 4017 membagi putaran roda gila pikap menjadi 10 divisi, dimana 3 atau 4 sinyal pinout terbawah dapat dianggap sesuai dengan sinyal yang mungkin ada. terjadi tepat sebelum sinyal pemicu pickup coil yang sebenarnya, demikian pula logika pinout high pada pin # 2,4,7 dapat disimulasikan menjadi sinyal yang muncul tepat setelah trigger coil pickup yang sebenarnya telah lewat.
Oleh karena itu kita dapat mengasumsikan sinyal pada pinout bawah dari IC 4017 menjadi 'memajukan' sinyal pickup yang sebenarnya.
Juga, karena pengaturan ulang dari pickup mendorong IC 4017 tinggi ke pin # 3, pinout ini dapat diasumsikan sesuai dengan pemicu 'direkomendasikan' normal pickup .... sedangkan pinout yang mengikuti pin # 3, yaitu pinouts2,4,7 dapat diasumsikan sebagai sinyal yang sesuai dengan sinyal terlambat atau sinyal 'terbelakang', sehubungan dengan pemicu pickup yang sebenarnya.
Cara Mengatur Sirkuit
Untuk ini, pertama-tama kita perlu mengetahui waktu yang dibutuhkan oleh sinyal pickup untuk menghasilkan setiap pulsa alternatif.
Misalkan Anda merekamnya menjadi sekitar 100 milidetik (nilai arbitrer), ini berarti bahwa IC 555 perlu menghasilkan pulsa pada pin # 3 pada kecepatan 100/9 = 11,11 ms.
Setelah ini disetel, kita kira-kira dapat mengasumsikan output dari 4017 menghasilkan logika tinggi di semua outputnya yang secara bertahap akan 'surut' karena sinyal pickup menjadi lebih cepat dan lebih cepat sebagai respons terhadap kecepatan kendaraan.
Ini akan menyebabkan logika 'tinggi' surut di pinout bawah IC 4017, oleh karena itu pada kecepatan yang lebih tinggi pengendara akan mendapatkan opsi untuk secara manual menggunakan set pin yang lebih rendah untuk memicu koil CDI, seperti yang ditunjukkan pada diagram (lihat opsi sakelar pemilih).
Pada gambar kita dapat melihat sakelar pemilih yang dapat digunakan untuk memilih pemicu pinout dari IC 4017 IC untuk memicu koil CDI.
Seperti dijelaskan di atas, set yang lebih rendah dari logika tinggi pinout surut setelah dipilih, akan memungkinkan pemicuan maju dari koil CDI dan dengan demikian memungkinkan pengendara untuk mencapai penembakan maju otomatis otomatis yang menyesuaikan diri dari koil CDI, namun ini harus dipilih hanya ketika kendaraan berjalan jauh di atas kecepatan normal yang disarankan.
Identiknya jika pengendara memikirkan kecepatan yang lebih rendah untuk kendaraan, ia dapat mengaktifkan sakelar untuk memilih opsi waktu 'terbelakang', tersedia di pinout yang berada tepat setelah pin # 3 dari IC 4017.
Selama kecepatan normal yang direkomendasikan, pengendara dapat memilih pin # 3 sebagai output pemicu untuk CDI yang akan memungkinkan kendaraan menikmati pengendaraan yang efisien pada kecepatan normal yang diberikan.
Teori advance / retard timing di atas terinspirasi dari penjelasan yang terungkap dalam video berikut:
Tautan video asli yang dapat ditonton di Youtube, diberikan di bawah ini:
Bagaimana Membuat Konsep Di Atas Diotomatiskan
Pada bagian berikut kita mempelajari metode untuk meningkatkan konsep di atas ke versi otomatis menggunakan tachometer dan tahapan rangkaian opamp. Ide tersebut diminta oleh Tuan Mike, dan dirancang oleh Tuan Abu-Hafss.
Spesifikasi teknis
Salam pembuka!
Hal-hal menarik di sini, saat ini saya meletakkan jejak pada CAD dan ingin mengetsa ini di beberapa PCB tetapi saya lebih suka memilih standar lanjutan atau mundur ke elektronik ...
Saya agak baru dalam hal ini tetapi merasa seolah-olah saya memiliki pemahaman yang cukup baik tentang konsep yang sedang dimainkan ...
pertanyaan saya adalah, apakah ada artikel yang Anda miliki tentang mengotomatiskan pemilihan lanjutan berdasarkan RPM mesin? oh dan daftar bagian dari berbagai komponen akan menjadi spektakuler ???
Terima kasih, Mike
Desain, oleh Abu-Hafss
Hai Swagatam
Mengacu pada artikel Anda di muka, perlambat percikan pengapian CDI untuk meningkatkan efisiensi sepeda motor kecepatan tinggi , Saya ingin mengomentari bahwa saya belum menemukan situasi apa pun di mana RETARDation (atau lebih tepatnya PENUNDAAN) penembakan bunga api diperlukan. Seperti yang Anda sebutkan, sebagian besar sepeda (sepeda balap) gagal tampil dalam RPM tinggi (biasanya di atas 10.000 RPM) sehingga diperlukan penembakan lebih awal. Saya memiliki ide yang hampir sama dalam pikiran saya, tetapi tidak dapat menguji secara fisik.
Berikut ini adalah tambahan yang saya usulkan ke sirkuit Anda:
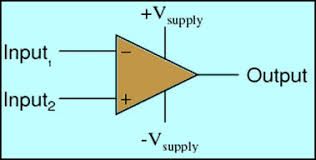
Untuk mengotomatiskan peralihan percikan api antara NORMAL dan ADVANCE, a sirkuit tachometer dapat digunakan dengan beberapa komponen lagi. Voltmeter dari rangkaian tachometer dilepas dan output diumpankan ke pin # 2 dari IC LM741 yang digunakan sebagai pembanding. Tegangan referensi 10V ditetapkan pada pin # 3. Rangkaian tachometer dirancang untuk memberikan output 1V terhadap 1000RPM sehingga 10V mengacu pada 10.000RPM. Ketika RPM lebih dari 10.000, pin # 2 memiliki lebih dari 10V dan karenanya output 741 menjadi rendah (nol).
Output ini terhubung ke basis T2 oleh karena itu, output rendah beralih pada T2. Jika RPM di bawah 10.000, output menjadi tinggi dan karenanya T2 mati. Pada saat yang sama T4, yang dikonfigurasi sebagai inverter sinyal, membalikkan output ke rendah dan yang sama dihubungkan ke basis T3 sehingga T3 dinyalakan.
Salam
Abu-Hafss

Sebelumnya: Cara mendapatkan Energi Gratis dari Pendulum Berikutnya: Membuat Sirkuit Regulator Tegangan 3.3V, 5V dengan Dioda dan Transistor